lidar_camera_calibration项目——激光雷达和相机联合标定
2019-04-12 09:27
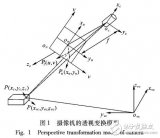
针对无人车(UGV)自主跟随目标车辆检测过程中需要对激光雷达(LiDAR)数据和摄像机图像进行信息融合的问题,提出了一种基于梯形棋盘格标定板对激光雷达和摄像机进行联合标定
2017-11-30 16:23
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特
2021-09-01 07:42
束的回波信号来获取目标信息。激光雷达从线束上分可以分为:1、单线束激光雷达主要是应用在扫地机器人2、多线束激光雷达这里主要是应用在汽车行业中,有16线束、32线束以及6
2017-09-19 15:51
。单线激光主要用于规避障碍物,由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精确。但是,单线雷达只能平面式
2017-09-25 11:30
想了解行业国内做固态激光雷达的厂家,激光雷达里面是怎么样的啊
2021-01-17 15:29
批量出货和广泛应用于各类盲区检测和障碍物探测的场景,它内置的避障算法的省心设计让它在现场吸引了更多客户。同样是固态激光雷达,CE30-A主要面向的是仅用于判断目标区域是否有行人或者物体入侵,或者行驶路径
2018-01-25 09:41
FMCW激光雷达与dTOF激光雷达的区别在哪?
2021-07-23 13:22
就像大家所熟知的那样,路程=速度×时间,激光雷达的测距过程也离不开这个公式。在空间中,激光的飞行速度是已知的3×108 m/s。现有的激光雷达测距方法
2020-09-02 16:56
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03