点击上方“AI算法修炼营”,选择“星标”公众号精选作品,第一时间送达这篇文章是激光雷达点云数据分割算法的嵌入式平台上的部署实现。主要的创新
2021-12-21 08:28
原来,这些都是激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信息,也是我们常说的X、Y、Z三个元素,有时还包含
2020-09-24 12:29
随着激光雷达的上车数量的不断攀升,如何用好激光雷达成为了重中之重,而用好激光雷达的关键点之一就在于处理好点云
2023-03-14 09:36
)、环境监测、城市规划等领域。激光雷达点云数据是激光雷达系统收集到的一系列三维空间坐标点,包含了丰富的空间信息。本文将介
2024-08-29 17:18

这篇文章是激光雷达点云数据分割算法的嵌入式平台上的部署实现。主要的创新点有两点
2022-01-26 18:15
其突出的优势在于:1.该方法达到了极高的精度。即使是在训练以及建图是用到了激光雷达(点云数据),但在实际线上使用时,只用了图像数
2022-11-15 09:54

PDAL是点云数据处理的库。这是一个C/C++开源库,用于点云数据的转换
2021-01-27 11:27
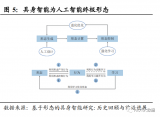
激光雷达与纯视觉方案的演绎。自动驾驶具有视觉主导和激光雷达主导 两种主流技术路径。特斯拉推出的擎天柱沿用了纯视觉方案,其测距算 法的关键在于用摄像头的数据生成类激光雷达
2023-08-02 11:06
机遇激光雷达在智能机器生态系统中有很多机遇。与使用二维图像相比,点云能够更容易的被计算机使用,用于构建物理环境的三维形象——二维图像是人脑最容易理解的数据,而对于计算机
2017-09-26 14:30
其他展位,两台固态雷达的点云数据实现完美的融合,特别彰显了北醒已经解决了困扰flash Lidar已久的互相干扰的技术难题,将更好地服务于大规模的应用。 目前LR30已
2018-01-25 09:41