原来,这些都是激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信
2020-09-24 12:29
)、环境监测、城市规划等领域。激光雷达点云数据是激光雷达系统收集到的一系列三维
2024-08-29 17:18
的交互。 在三维重建中,主流的方式有视觉和激光雷达两种。视觉技术的测距方法是基于三角的测距法,最大范围是 5-8m,并不适用于较大的空间,且这种方法受光线的影响很大。相比之下,
2021-11-16 14:59

本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理
2019-06-02 10:00
点云是世界的一种非结构化三维数据表示,通常由激光雷达传感器、立体相机或深度传感器采集。它由一系列单个
2024-10-29 09:21
随着激光雷达的上车数量的不断攀升,如何用好激光雷达成为了重中之重,而用好激光雷达的关键点之一就在于处理好点云
2023-03-14 09:36
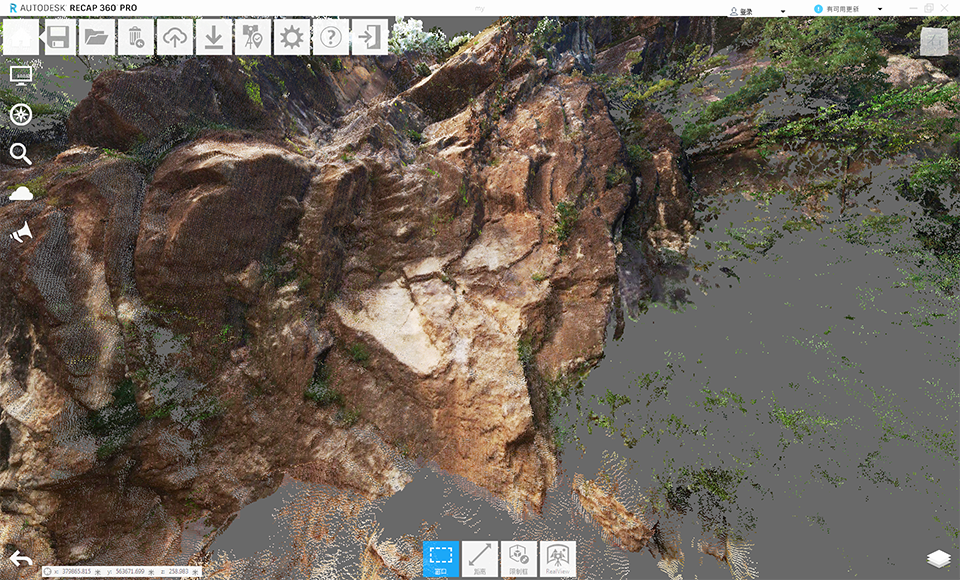
点云建模是将测量得到的点云数据进行拟合、优化与处理,生成真实的
2024-05-15 16:32
可以监测天气情况的三维激光雷达系统问世 多普勒雷达常被用于监测天气情况,特别是水平旋转的云层周围的乌云监测。但若要获得第三维(垂直)
2008-09-02 08:46
LIDAR激光雷达逆向建模是一种利用激光雷达技术获取物体表面数据,然后通过计算机软件进行建模的方法。在建筑行业中,这种方
2024-08-29 17:23
基于三维激光点云的目标识别与跟踪研究 来源:《汽车工程》 ,作者徐国艳等 [摘要] 针对无人车环境感知中的障碍物检测问题,设计了一套基于车载
2022-01-17 11:22