激光雷达(LiDAR)是一种用于精确获得三维位置信息的传感器,好比人类的眼睛,可以确定物体的位置、大小、外部形貌甚至材质。
2020-07-13 10:55
激光雷达和与之竞争的传感器技术(相机、雷达和超声波)加强了对传感器融合的需要,也对认真谨慎地选择光电探测器、光源和MEM
2018-04-07 12:18
最近Velodyne挑起的激光雷达LiDAR专利之战成为了业界热点。可以说在严苛的自动驾驶系统中激光雷达成为一种不可替代的传感器。今天让我们详细聊聊
2019-08-26 11:03

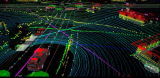
本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理
2019-06-02 10:00

(长沙)测试区即将打造完成雨、雾、光、尘等典型测试场景,也是目前国内唯一同时具备雨、雾、光、尘等场景的测试区,可满足激光雷达等传感器大批量可复现的真实环境测试需求。
2023-07-05 11:13

针对具有挑战性的光照条件和恶劣环境,本文提出了LIR-LIVO,这是一种轻量级且稳健的激光雷达-惯性-视觉里程计系统。通过采用诸如利用深度与激光雷达点云关联实现特征的均匀深度分布等先进技术,以及利用
2025-04-28 11:18
雷达是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。 传统的雷达是微波和毫米波波段的电磁波为
2018-02-20 09:48
激光雷达的物理原理本质上就是“距离=速度*时间”,通过测量激光信号的信号差和相位差来确定距离。相较于发射电磁波的毫米波雷达和发射机械波的超声波雷达,
2023-07-11 16:21

。该框架旨在解决在激光雷达表示中引入记忆的若干挑战,包括遮挡、资源限制和动态场景。作者引入了一种点级邻域变化正则化器,用于抑制局部三维邻域内预测的剧烈变化,并在SemanticKITTI
2023-11-21 10:48
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木,道路,桥梁和建筑物上引起散
2020-07-13 11:00