
本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理激光雷达数据。在激光雷达
2019-06-02 10:00
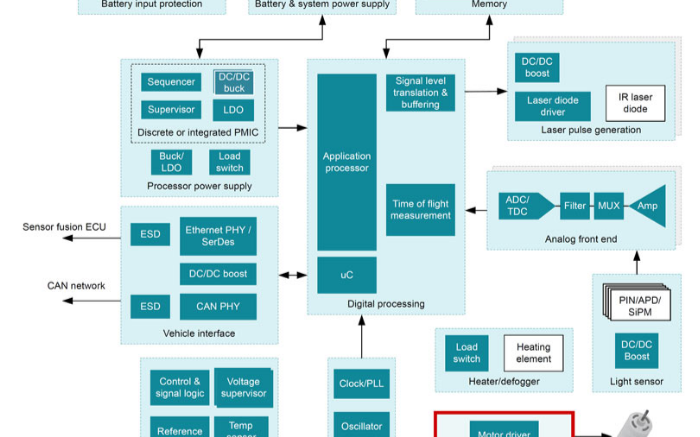
激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。
2022-03-07 14:21
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通
2022-06-20 16:53
的“眼睛”被称为光检测和测距(激光雷达)技术,可提供汽车周围环境的精确图像。激光雷达使用光源和传感器来检测物体。 激光雷达系统的视场 (FOV) 决定了
2022-06-30 17:01
SOSLAB与纵慧芯光(Vertilite)并肩作战,开发出ML(Mobility LiDAR)系列激光雷达,突破了被认为固态激光雷达的局限:距离和视场角的问题,SOSLAB正在通过ML系列纯固态
2022-08-23 14:46
据麦姆斯咨询报道,高分辨率激光雷达传感器领先供应商Ouster近日在2020年国际消费电子展(CES 2020)上推出了两款高分辨率数字激光雷达传感器超宽视场角的OS0-128以及远程OS2-128
2020-01-29 11:23
要实现大范围空间感知,激光雷达光源必须能够对大视场(FoV)进行扫描。然后,通过测量每个方向的飞行时间,逐点检测场景中的对象,以构建光学回波图。调幅连续波(AMCW)、调频连续波(FMCW)或步进频率连续波(SFCW)等其他测量原理采用恒定或时间调制频率的连续波来
2022-10-18 16:13
单线激光雷达和多线激光雷达区别 单线激光雷达和多线激光雷达是两种常用的激光雷达技术。它们在
2023-12-07 15:48
激光雷达在自动驾驶应用中主要用来探测道路上的障碍物信息,把数据和信号传递给自动驾驶的大脑,再做出相应的驾驶动作,但室外常见的干扰因素如雨、雾、雪、粉尘、高低温等对激光雷达的识别造成了极大的影响。因此
2023-07-14 11:11
电子发烧友网报道(文/周凯扬)在激光雷达市场,除了冲击车规、低成本和快速量产外,追求更大的视场角、分辨率和探测距离也是比较常见的竞争方向。靠机械结构与电机旋转的机械激光雷达无疑
2023-02-03 02:08