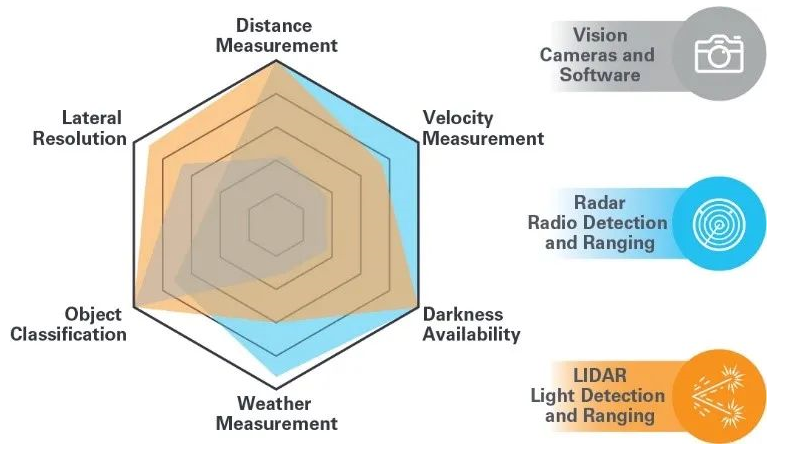
数据库中直觉反应。复现人类驾驶能力所需的传感器包括雷达、激光雷达(LIDAR)、摄像头、惯性测量单元(IMU),以及超声波传感器。每种系统都有其优势,也有其缺点。单一传感器的精度和性性能不足以取代所有其他
2020-09-27 16:46
激光雷达的硬件模块有哪些? 车载激光雷达的发展阶段有哪些? 目前,车载激光雷达的物体探测方式有哪些?
2023-02-06 09:25
同时,VI4310针对NIR(近红外光谱技术)波长进行了特殊优化,使得单光子器件(SPAD)在940nm波长处的PDE(光子探测效率)高达到10%以上。内部集成的专用数字处理算法(DSP)和图像处理算法(ISP)专门为低功耗进行优化,在保证测距精度和性能的前提下,最大幅度的减小芯片的整体功耗。鉴于其小体积和低功耗的优异表现,VI4310芯片以及由VI4310构成的模组VM4310(整体尺寸为22 x 23 x 5.5mm),可实现室内5m内1% RMSE的探测精度,非常适合智能手机和平板电脑等应用场景。
2020-06-10 17:05
接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。激光雷达主要包括激光发射部分、扫描系统、激光接受部分和信息处理部分,结构
2021-09-13 06:30
。单线激光主要用于规避障碍物,由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精确。但是,单线
2017-09-25 11:30
一维激光雷达主要用于距离测量,主要厂家如博世、徕卡等;二维激光雷达主要用于轮廓测量、定位和区域监控,
2020-07-31 08:58
最早的激光雷达主要用于测绘,本文,我们就从机载激光雷达的历史来了解一下激光雷达的发展历程。
2018-08-22 08:50
激光雷达主要是由激光发射器、接收器、处理器以及激光操控模组这四个模块构成。使用激光雷达测距,多用飞行时间法(TOF)。
2022-02-22 09:18
束的回波信号来获取目标信息。激光雷达从线束上分可以分为:1、单线束激光雷达主要是应用在扫地机器人2、多线束激光雷达这里主要
2017-09-19 15:51
按照测距方式不同,激光雷达主要分为ToF(Timeof Flight,飞行时间)与FMCW(FrequencyModulated Continuous Wave,调频连续波)两类。ToF类型是目前量产的激光雷达的绝大
2022-11-16 10:21