无人平台在大范围环境中 实现自 主定位与导航的能力 需求日 益严苛, 其中 基于激光雷达的同步定位和绘图 技术(SLAM) 是主流的研究方案。 在这项工作中, 本文系统概述了 3D 激光雷达
2022-03-21 16:07
激光雷达分单线和多线这两大类,针对这两类Lidar所使用的算法也不尽相同。 首先单线雷达一般应用在平面运动场景,多线雷达则可以应用于三维运动场景。
2023-03-27 11:02

一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto
2021-04-18 10:18
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto
2023-03-27 11:06
LONER是一个纯LiDAR算法,也没有使用IMU。雷达扫描首先降采样(将为5 Hz),然后用ICP跟踪,并从场景几何中分割出天空。对于建图线程,是使用当前关键帧和随机选择的过去关键帧来更新,并维护一个滑窗来优化。
2023-10-25 10:48
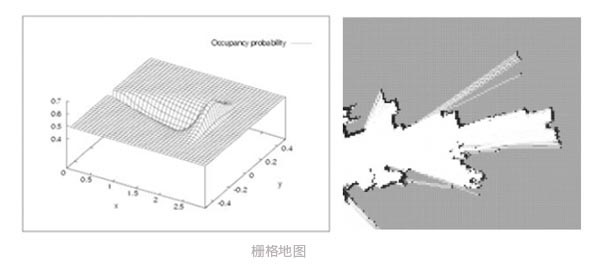
移动机器人想要实现自主行走,核心在于实现自主定位导航,在自主定位导航技术中会涉及到定位、建图、路径规划等问题,而地图构建的好坏将直接影响机器人的行走路径。 机器人想要到达某个目的地,需要和人类绘制地图一样,描述环境、认识环境的过程主要就是依靠地图。它利用环境地图来描述其当前环境信息,并随着使用的算法与传感器差异的不同,所采用的地图描述形式也不同,在机器人学中,地图的表示方法主要包括了格栅地图、特征点地
2020-02-12 12:12

一方面获取传感器采集的各帧数据对应的局部坐标系的位置和姿态是构建地图的关键, 即建图包含了定位问题; 另一方面构建准确的地图又是精确定位的前提, 因此, 定位与建图两者是高度耦合的,可作为一个问题寻找解决方案。
2024-01-18 16:39
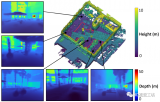
SLAM 背后的核心思想是让机器人或自主系统能够探索未知环境并创建该环境的地图,同时确定其在生成的地图中的位置。这是通过融合来自各种传感器(例如激光雷达、摄像头和惯性测量单元 (IMU))的数据
2024-11-16 10:57
电子发烧友网报道(文/李宁远)SLAM,simultaneous localization and mapping,称为即时定位与地图构建,主要的作用是自动驾驶车辆或机器人从未知环境的未知地点
2022-11-20 23:47
