相机和激光雷达之间的时间戳同步问题一直是实时跑SLAM的先决条件。本文试图以最清晰的思路去讲明白这个事情,开始本文之前,先介绍几个基本概念。
2021-03-27 11:36

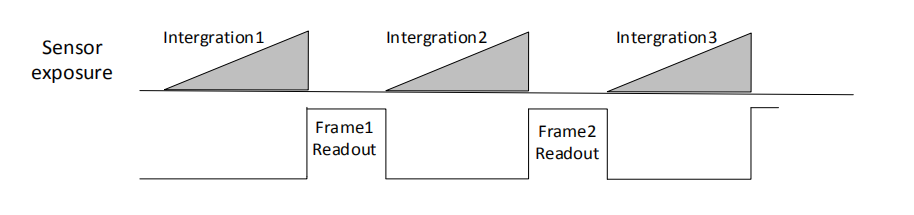
相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。
2023-05-17 09:42
来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参
2022-11-10 14:59

本文提出了一种自动在线激光雷达相机自标定方法CFNet。CFNet是全自动的,不需要特定的校准场景、校准目标和初始校准参数。我们定义一个校准流来表示初始投影点的位置与地面真值之间的偏差。
2023-10-10 11:44

包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。 本方案中使用了标定板角点作为
2023-11-28 11:09

激光雷达在抗干扰能力方面,与微波毫米波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,可全天
2023-05-19 16:17

激光雷达具有高精度电子地图和定位、障碍物识别、可通行空间检测、障碍物轨迹预测等功能。
2020-04-07 11:33

为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法提供精确的外部参数。然后在KITTI基准上用地面
2023-08-31 10:50
相机和激光雷达之间的时间戳同步问题一直是实时跑SLAM的先决条件。本文试图以最清晰的思路去讲明白这个事情。
2022-11-28 16:08
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通
2022-06-20 16:53