和摄像头深度融合网络,以改进交通场景下的 3D 语义分割。单个传感器主干提取相机图像和激光雷达点云的特征图。
2022-10-09 15:24
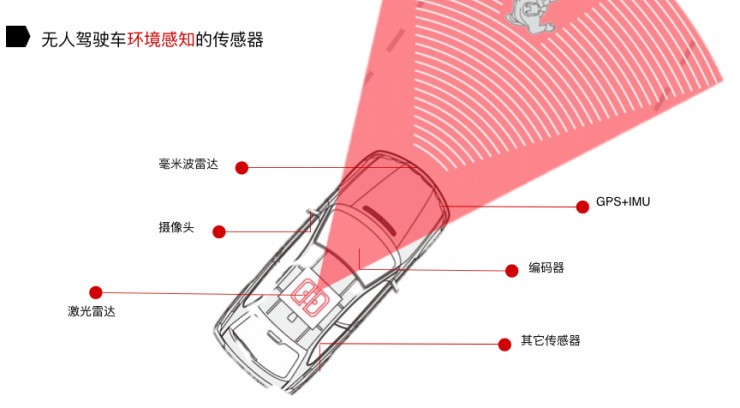
在无人驾驶汽车上,激光雷达和摄像头相对于是汽车的“眼睛”,他们俩各有不同的优缺点,激光雷达是获取高精度地图非常重要的传感器,那么无人驾驶汽车到底用激光雷达还是用
2016-12-07 10:42
只要数据够好,就可以用那些为摄像头开发的算法,来做深度学习。
2018-10-01 16:33
经过拆解可以看出PIN型固态激光雷达除镜头外都有标准的量产元件可以选择,门槛很低,成本也不高,未来可以取代传统的低像素摄像头。但与摄像头比,激光雷达可以全天候全天时工作
2018-05-24 03:12

本文是,加拿大滑铁卢大学CogDrive实验室,对当前最新的基于深度学习的相机-激光雷达融合(camera-LiDAR Fusion)方法的综述。
2020-04-15 16:16

摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及
2025-06-01 08:33 上海晶珩电子科技有限公司 企业号

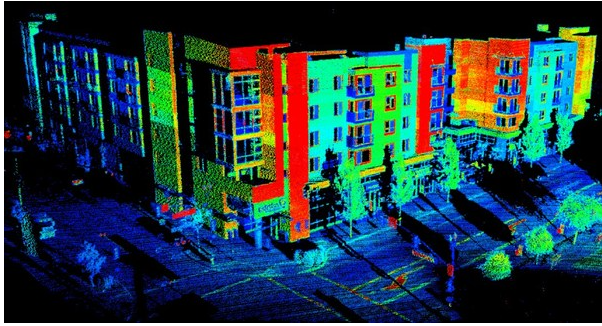
所谓雷达,就是用电磁波探测目标的电子设备。激光雷达(LightDetectionAndRanging,简称"LiDAR"),顾名思义就是以激光来探测目标的雷
2023-12-18 17:18
在救援方面,激光雷达也具有不受光线影响的优势,可以弥补摄像头在黑暗光线下无法清晰定位和描述的弱点,在供电中断光线昏暗的情况下,我们依然可以利用手持激光雷达设备实时进行移动式测量,开展救援工作。
2021-08-10 17:18
载波的雷达。激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上
2018-02-20 09:48
激光雷达接收器一般有几到几十纳秒的死区时间(Dead Time),死区时间是指激光雷达接收到一个激光脉冲后到再能接收一个新激光脉冲所需的最短时间。
2023-01-31 13:52