深度相机也具备普通相机的一些不足,容易受视差影响:包括黑色物体(特征点少)、透明物体(光的穿透)、光滑物体(光反射太强)、图像无纹理(特征点少)、过度曝光(特征点少)等。
2022-03-11 13:38
深度相机正在成为一种基石模式,具有直接或间接依赖于测量深度的多种应用,包括个人设备、机器人和自动驾驶汽车。
2022-08-18 11:18

传统的RGB彩色普通相机称为2D相机,只能拍摄相机视角内的物体,没有物体到相机的距离信息,只能凭感觉感知物体的远近,没有明确的数据。而RGB-D
2023-07-06 10:22
光学器件在飞行时间(ToF)深度传感相机中起着关键作用,光学设计决定了最终系统及其性能的复杂性和可行性。3D ToF相机具有某些独特的特性1这推动了特殊的光学要求。本文介绍了深
2022-12-15 14:19
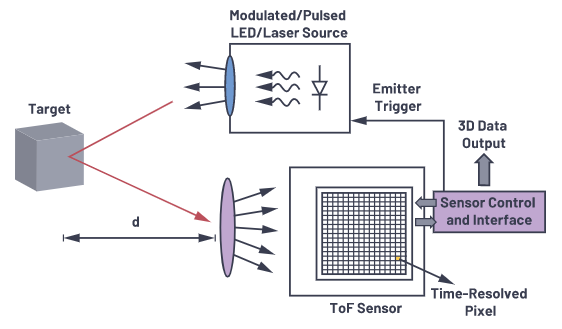
光学器件在飞行时间(ToF)深度传感相机中起着关键作用,光学设计决定了最终系统及其性能的复杂性和可行性。3D ToF相机具有某些独特的特性1这推动了特殊的光学要求。本文介绍了深
2022-12-09 15:37
决策,并使用Kinect展示一些最终实验结果,它一种非常流行的RGB深度相机,它与iPhone X前置摄像头的输出非常相似(但设备更大)。那么,让我们开始对苹果的革新进行逆向工程。
2018-03-20 16:08
灰度是描述灰度图像内容的最直接的视觉特征。它指黑白图像中点的颜色深度,范围一般从0到255,白色为255,黑色为0,故黑白图像也称灰度图像。灰度图像矩阵元素的取值通常为[0,255],因此其数据类型一般为8位无符号整数,这就是人们通常所说的256级灰度。
2022-03-21 13:37
线阵相机,是采用线阵图像传感器的相机。面阵相机是一种可以一次性的获取图像并能及时进行图像采集的相机它们都是工业相机,那么
2022-01-29 16:02

这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00
工业相机是机器视觉系统必不可少的核心组件,根据不同的类别有不同的分类标准。按传感器的结构特性分类,可分为面阵相机与线阵相机两种。其中,面阵相机是以面为单位来进行图像采集
2023-12-14 16:55