针对潜艇发射水下航行器攻击水面目标这一想定进行视景仿真。利用Multigen Creator进行三维实体建模和地形生成,基于Vega Prime实时视景仿真平台开发水下
2017-11-16 10:53

提出了一种基于CAN总线的分布式水下航行器控制器的设计方法,主要描述了其硬件总体设计方案和实现办法。控制器作为分布式控制
2013-06-08 17:54
基于CAN总线的水下航行器分布式控制系统
2021-07-01 16:53
水下航行器非接触式电能传输技术研究_王司令
2017-01-07 15:17
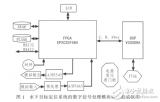
水下航行器通用的数据处理软件设计方案
2021-06-30 15:29

针对水下传感器网络(UwSN)存在能耗高、传输率低和带宽窄等问题,提岀自主水下航行器(AUV辅助的水下地理杌会路由协议(
2021-04-09 16:19

路径规划算法是自主水下航行器(AUV)完成水下自主巡航的核心算法之一。分别综述了基于环境建模和路径搜索两类AUⅣ路径规划算法。阐述了栅格法、可视图法和维诺图法等环境建模
2021-04-09 16:01
2015-08-28 17:58
随着水下武器和水下航行器等水下目标的快速发展,对其进行定位和跟踪从而检验其性能的试验具有非常重要的意义,这也是
2017-09-06 17:05
本帖最后由 eehome 于 2013-1-5 10:05 编辑 水下机器人水面控制台通常基于计算机平台,体积较为庞大,不便于移动。但在某些情况下,如水下机器人水面回收或者水面测试载体各种航行
2011-03-08 14:21