新的变步长LMS算法及DSP设计 Widrow和Hoff等人于1960年提出最小均方误差(LMS)算法,由于其结构简单,计算量小,稳定性好,易于实
2010-05-14 15:57
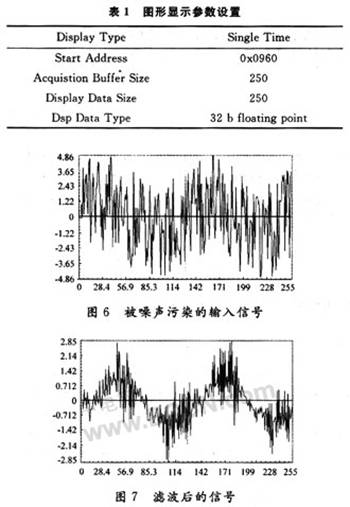
所有的声音均是由一系列不同频率的声信号混合而成,如果可以人为地生成一种声音,其频率与所要消除的噪声完全一样,只是相位与之相反就可以将这噪声完全抵消掉。主动噪声控制(ANC) 就是在设备中加入了对噪声
2021-04-17 10:09
离散步长控制。LM4811有一个外部控制端,产生有效高电平关断模式,使之在微功耗下工作,还有一个内部热关
2019-01-07 07:48
拿数字光纤直放站来说,在直放站和基站直接会有耦合器和衰减器。但是耦合器和衰减器都是5dB或者2dB的步进,很少会有1dB的步进的无源器件
2023-10-10 14:43

。 Q Spice 的构想不仅是为了解决这些技术进步,还提供增强的设备建模、复杂的时间步长控制、卓越的波形可视化和直
2025-06-03 11:14
的一些重要的经验教训。 几天前,John 在测试某个设计的瞬态稳定性数据时,获得了一个重要发现:输出信号的步长对实现准确的结果极其重要。 在当 John 开发某个设计并需要用运算放大器来缓冲 1μF
2021-11-10 09:44

伺服电机的最简单的控制方法是使用脉冲/方向信号控制。这种方法使用脉冲信号控制电机的位置和方向。具体来说,当接收到一个脉冲信号时,电机会运动一个固定的步长,方向信号则
2023-03-01 15:49
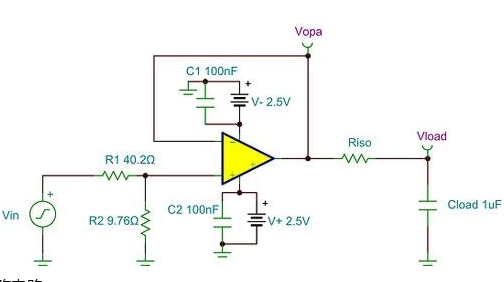
几天前,John 在测试某个设计的瞬态稳定性数据时,获得了一个重要发现:输出信号的步长对实现准确的结果极其重要。 在当 John 开发某个设计并需要用运算放大器来缓冲 1F 的负载时,问题出现了
2018-03-27 09:13
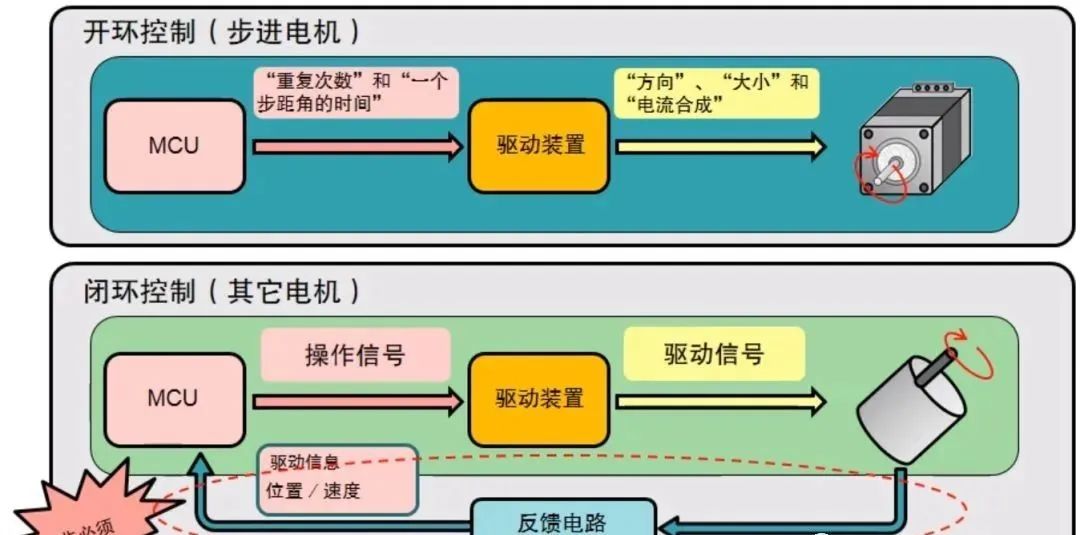
步进电机是我们生活中常见的电机之一。顾名思义,步进电机是根据一系列步距角进行旋转,就像人们一步步上下楼梯一样。步进电机将完整的360度旋转等分为若干步长,按顺序执行步长从而实现特定旋转,同时通过
2023-03-08 15:12
步进电机通常有两种控制方式:全步控制和微步控制。全步控制是通过给定定子上线圈的电流方向来控制步进电机的运动,从而让转
2023-03-03 11:02