
引言: 在本文中,我们将深入探讨机器人学的两个核心概念:正运动学和逆运动学。这两个概念是理解和控制机械臂运动的基础。通过
2023-11-06 14:58
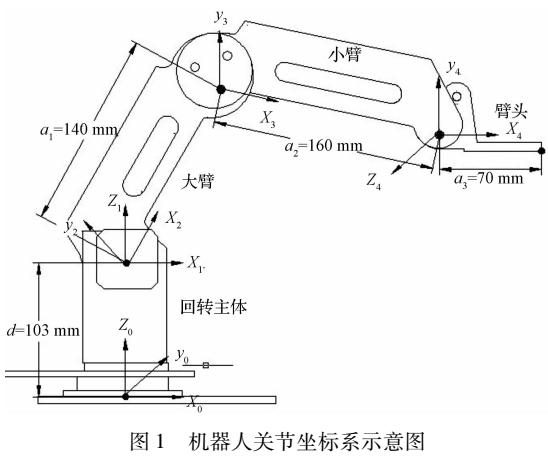
为了获得Dobot机器人的正逆解计算公式、避免解被丢失的可能性和保证角的精度,根据该型机器人的结构特点,运用D-H法建立了机器人的坐标系和运动学方程,进行了正
2018-03-14 15:00

逆运动学问题是给定机器人末端操作器的位姿来计算对应的关节变量的过程。逆运动学的精确求解对机器人的控制有着非常重要的作用。相比正
2017-10-16 17:45
电机控制 运动套件
2024-03-14 20:43
EtherCAT总线扩展模块包含哪些?怎样去使用正运动技术运动控制器EtherCAT总线?
2021-09-27 08:34
运动控制模块 背板
2024-08-02 01:03
之前正运动技术与大家分享了,运动控制器的固件升级、ZBasic 程序开发、ZPLC 程序开发、与触摸屏通讯和输入/输出IO 的应用、运动控制器数据与存储的应用、
2021-09-07 06:59
逆变焊机使用正接还是反接通常取决于具体情况和要求。下面将详细介绍逆变焊机的正接和反接的特点、使用场景以及优缺点。 一、逆
2024-02-27 14:09

