MEMS陀螺正交误差分析理论及分析,适用于初学者学习
2015-12-08 09:53
正在将MEMS惯性测量单元(IMU)用于个人交通工具平台的自平衡制导系统,是否会有一款面向消费者,能消除各传感器之间的全部对齐误差,并且所有核心传感器元件都集成在单个芯片上的IMU?
2017-08-29 15:30

实际使用的三轴磁传感器在探测平台晃动时,所测磁场模值会有较大误差。在传感器测量模型所建立的校正矩阵基础上,通过变换得到新的矩阵,简化了求解,克服了LMS 算法在没有获得
2011-05-12 17:18
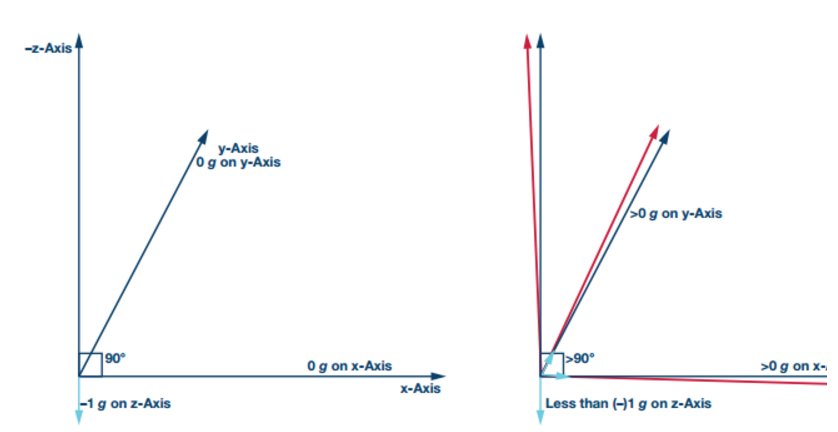
。轴到封装对齐误差描述各轴相对于IMU封装内机械特性的对齐程度。轴到轴对齐误差描述各加速度计和陀螺仪轴的对齐在多大程度上符合理想正交性。正因如此,轴到轴对齐误差也常被称
2018-10-30 15:00
正交误差在2°左右,即幅相误差引入的镜像功率在-34 dB左右。这样的技术性能限制了信号处理器性能的提高。
2019-11-07 06:38

正交误差在2°左右,即幅相误差引入的镜像功率在-34 dB左右。这样的技术性能限制了信号处理器性能的提高。为此,近年来提出了对低中频直接采样恢复I、Q信号的数字相位检波器。
2017-11-24 20:31
数字振荡器(也称为数控振荡器,NCO)的实现要求涉及多个方面,主要包括高精度、灵活性、频率分辨率、相位连续性以及实现方法的优化等。以下是对这些要求的介绍: 1. 高精度 低正交误差 :在正交数字
2024-09-25 10:34
改进的IMU传感器安装误差正交补偿方法_马亚平
2017-03-19 19:04
本次在线研讨会概要介绍外差和零差架构,详述直接变频方法,分析并讨论I/Q失调和失配及其它异常的原因和影响。此外还将介绍正交误差校正方法,并进行性能改进分析。性能比较使用了实际的ADI直接变频接收机器件。
2019-07-11 06:18

位于一块硅片上,但制造和制造差异引入的固有误差仍会累积正交误差。与完全校准的工业目标IMU相比,由此产生的等效对准精度实际上并不令人印象深刻。
2023-02-16 11:42