
在介绍以下内容之前,我们假设读者已经对复数与2D旋转、3D空间中的旋转、四元数的性质以及四元数与3D旋转等数学理论有一定的阅读理解基础。
2023-08-07 09:57
加速度计测量的是其感受到的加速度,在静止的时候,其本身是没有加速运动的,但因为重力加速度的作用,根据相对运动理论,其感受的加速度与重力加速度正好相反,即读到的数据是竖直向上的。加速度计的英文简写为acc,下面用首字母a代表加速度计数据。
2022-08-02 09:33

姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行器中使用到了四元数和欧拉角。
2023-12-18 11:07
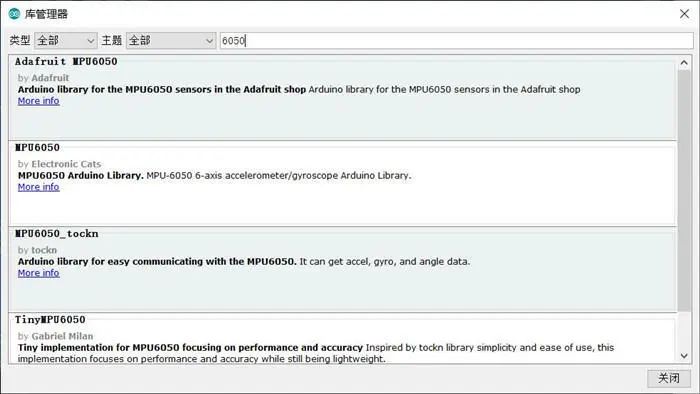
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,运算量相对较大),方便在STM32主控上实现,可
2017-11-07 10:39

上一节我们成功读取到了IMU的数据,其中角度用欧拉角的方式表示的,在我们机器人世界里姿态的表示往往使用四元数表示(如果不清楚他们之间的关系可以回看第六章机器人学篇),所以我们需要将欧拉角转换成四元数。除此之外我们还需要将其坐标系矫正到右手坐标系。
2023-07-13 14:55
lsm6ds3trc包含三轴陀螺仪与三轴加速度计。 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行器中使用到了四元数
2023-11-14 10:11

LPMS-BE2 是一款低成本、高精度的 6 轴惯性测量单元。它整合了三轴加速度计、三轴陀螺仪传感器,能提供包括欧拉角、四元数和加速度等信息在内的精确数据。
2022-06-22 18:01

其中,x, y, z表示平移方向上的分量,Φ,θ,ψ表示旋转方向上的分量(欧拉角表示)。向量d_k的每个分量都是二值的(0或者1,其中0表示该分量上的定位信息可靠,1则表示不可靠)。
2023-04-27 15:53
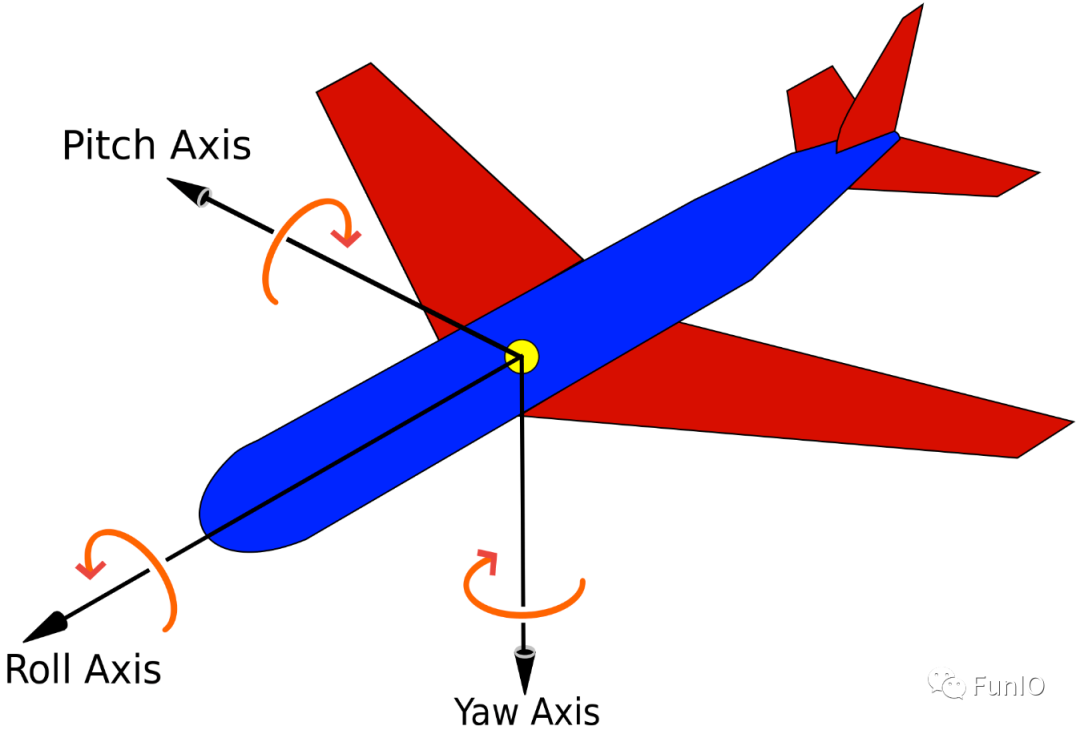
在飞行器的控制中,姿态计算是至关重要的一步。姿态计算的目标是确定飞行器相对于参考坐标系的姿态,通常以欧拉角(滚转、俯仰和偏航)或四元数的形式表示。
2023-06-14 10:41
对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
2023-06-15 15:03