MPU6050基于STM32,程序中加入MPU的官方库DMP,计算出欧拉角,可在串口助手中观察欧拉角的变化
2017-03-01 12:48
MPU的旋转矩阵 四元数 欧拉角比较,能够帮助新手了解三者的不同之处
2015-12-08 11:41
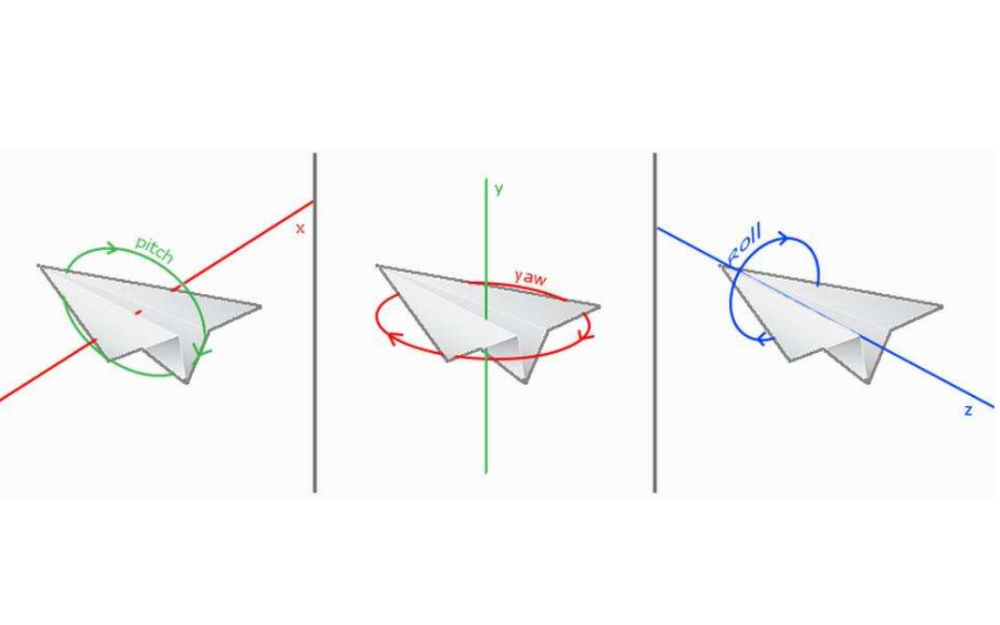
四元数转化为欧拉角: 1. 初始姿态的四元数(w,x,y,z)=(1,0,0,0) 命名为A(四元数初值) 2. 读取3轴陀螺仪当前时刻的Yaw,Pitch,Roll角速度,乘以上次计算以来
2019-12-05 17:03
基于stm32MPU6050输出欧拉角,四轴控制,感兴趣的小伙伴们可以瞧一瞧。
2016-11-04 19:26

本文档的主要内容详细介绍的是MPU6050传感器的四元数欧拉角程序免费下载。
2019-08-30 17:29

1,首先找到inv_mpu.c将所有宏定义更改为,自己所写的函数内容:找到inv_mpu_dmp_mothion_driver.c,和上面更改的方式一样找到motion_driver_test.c,借鉴其中的内容我们进行魔改留下函数更改init函数如下uint8_tmpu_dmp_init(void){intresult;result=mpu_init...
2021-12-06 15:51
2015-05-08 14:47
四元数与欧拉角之间的转换
2016-08-17 12:08
Graphical User Interface(GUI)(OLED)使用图形用户界面简易菜单菜单和各种显示都放到main.c里面,要显示的数据经过字符转化之后放到buff里面再 调用显示 。同一个页面的显示用个函数包装起来。直接用几个变量,通过它们的值来跳转不同的界面(达到这个效果后尝试在里面设置参数)或者用结构体,来定义不同的页面Openmv与F103串口通信任务:将openmv通过串口发送过来的数据用OLED显示出来(完成)注意串口的
2021-12-06 16:21
--------------------------------------------------------- 记录自学过程 -------------------------------------------------------------可能有些说明不对的地方,请大家一定要提出来提出来,共同学习 .共同进步.–>>>本文章HAL库编写MPU6050输出六轴原始数据,移植DMP输出自身姿态角程序链接程序链接程序链接目录一、mpu6050的通信
2021-12-06 14:36