电子发烧友
6862次浏览
这是一个求助贴:四轴,用MPU6050DMP算出欧拉角之后紧接着干什么呢?是控制四个电机努力把三个角都变为零?没搜到相关帖子,望过来人赐教
2015-01-24 20:50
MPU6050基于STM32,程序中加入MPU的官方库DMP,计算出欧拉角,可在串口助手中观察欧拉角的变化
2017-03-01 12:48
MPU的旋转矩阵 四元数 欧拉角比较,能够帮助新手了解三者的不同之处
2015-12-08 11:41
四元数转化为欧拉角: 1. 初始姿态的四元数(w,x,y,z)=(1,0,0,0) 命名为A(四元数初值) 2. 读取3轴陀螺仪当前时刻的Yaw,Pitch,Roll角速度,乘以上次计算以来
2019-12-05 17:03
四元数与欧拉角之间的转换
2016-08-17 12:08
现在有一个需求,手上只有一个陀螺仪,如何计算欧拉角,不考虑积分误差,无需使用其他传感器融合,数学没学好,不知怎么操作
2024-04-29 07:06
原子的开发手册上面只说了 欧拉角矩阵 套用欧拉微分具体是怎么算的。
2019-06-12 04:36
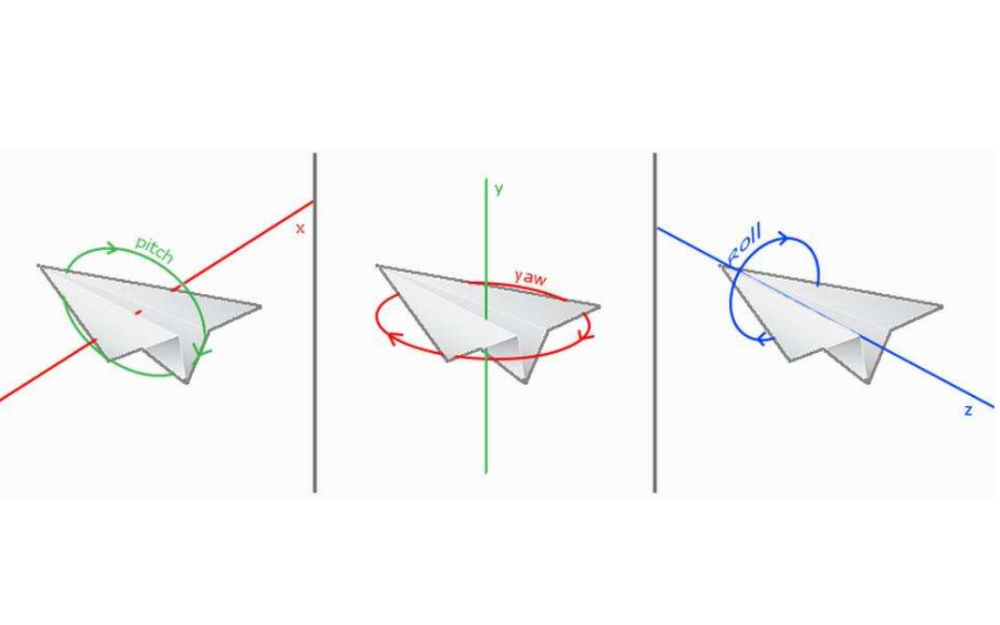
1.对于飞行器来说欧拉角/姿态角中的Yaw角到底是绕机体Z轴旋转的角度还是机体X轴与大地坐标系X轴的夹角;2.在原子的例程中,欧拉角它的绕轴旋转顺序是什么;
2019-05-14 23:40
使用MPU9250传感器,测量某一位置的九轴数据,将数据存到数组里(大概6000个点),把数据放到MATLAB里的算法中计算,得出这个位置的欧拉角,但是始终偏航角有问题,其他角是对的,请问有没有遇到类似问题的?
2018-05-17 21:41
基于stm32MPU6050输出欧拉角,四轴控制,感兴趣的小伙伴们可以瞧一瞧。
2016-11-04 19:26