分析了欠驱动两自由度机械臂主、被动关节间的动力学耦合特性,指出了被动关节
2009-08-04 15:51
基于模糊PD算法的三自由度机械臂遥操作双边控制_邱恒
2017-01-21 12:16
我希望这些照片对您有所帮助组装您的4自由度机械臂。
2019-10-09 11:52
的LabVIEW8.2作为开发平台,通过NI PCI-7344四轴运动控制卡和多功能数据采集卡来实现对于机械臂四个自由度的驱动
2019-05-06 09:26
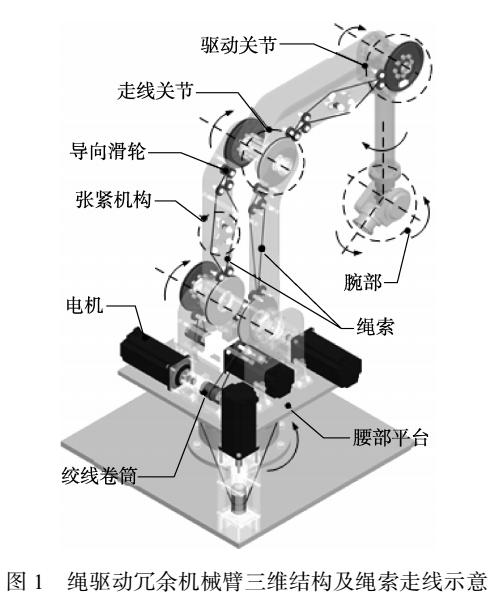
关节自由度,作为位置控制;采用电机直接驱动腕部关节3个自由度,作为姿态控制。利用绳索将
2018-02-27 14:33
现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23

为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后
2012-02-17 16:55
项目名称:采用labview与FPGA的多自由度机械臂快速控制系统原型开发试用计划: 机械
2016-12-19 15:30

现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由
2018-02-07 15:40
的方案:1. 对于底盘(腰部)、大臂俯仰、小臂俯仰这三个自由度,利用伺服电机驱动和编码器反馈来构成闭环控制系统,由于本项目对于定位精度的要求,伺服电机
2015-02-12 16:10