1引言 跷跷板系统是一个比倒立摆系统更为复杂,更接近于实际应用的典型控制系统。它具有严重的非线性、强耦合、对干扰敏感、模型过于复杂
2010-08-13 11:31
一种基于滑模控制的正弦波逆变器 摘要:提出了一种新的基于滑模
2009-07-15 09:31
滑模控制目的 对于滑模控制而言,我觉得我们先要明白其目的再来学习。 一开
2023-11-15 17:15
Boost电路具有动态修正误差的滑模变结构控制 摘要:在滑模等价控制的
2009-07-25 10:43

随着系统功能的日益复杂,以自适应控制为代表的先进控制理论与算法越来越多地被投入到工程应用当中。而随着大家对被控物理系统特性本身和控制理论更加深入的研究,像鲁棒控制、模型
2024-12-14 14:15

三电平DC/DC变换器的拓扑结构及其滑模控制方法 摘要:首先阐述了三电平DC/DC变换器拓扑的推导过程,给出了6种非
2009-07-07 10:53
;文献[7]中采用单神经元PID控制方法,虽然可以优化电机启动性能,但控制器增益无法实现自我调节;文献[8]中采用滑模变结构对永磁同步电机进行
2018-05-09 09:21

基于滑模变结构控制的三相有源电力滤波器 0 引言 近年来,非线性负荷的广泛应用对供电质量造成了严重污染,电力系统中的谐
2009-07-04 11:47
。 该算法由于无需建立精确模型,算法简单易实现,广泛应用于各工业领域,但其参数调整比较困难,因此有许多学者将现代智能化算法如模糊控制、神经网络控制等算法与 PID算法进行结合,简化了
2023-11-10 17:50
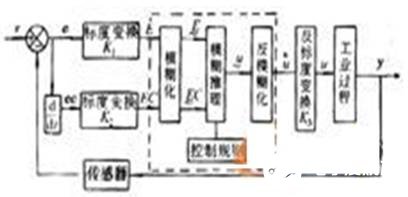
模糊控制系统的核心是模糊控制器,由模糊化、模糊推理、
2021-01-24 10:36