预制梁在制作完成后,需要有起重机械将预制梁放在运梁车上运走,这个起重设备被称为提梁机。这个提梁机上需要用多个绝对值多圈编码器来做双轨同步纠偏与双吊点平衡起升。
2018-08-28 16:49
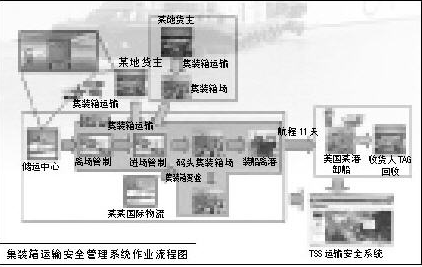
RFID读取器将读取到的集装箱信息透过港口本身的光纤网络,传送至办公大楼信息室内的现场工作服务器,现场工作服务器再将信息传回至TSS 系统,启动海运运输的集装箱安全监控。
2020-04-12 17:58
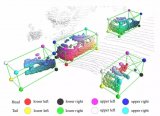
与二维图像中会相互遮挡的物体不同,三维点云中的物体都是天然分离的,使得三维目标内部各个部分的相对位置可以精确获取,这些方法将有效提高目标检测方法的性能。基于这样的观察结果,研究人员提出了一个部分感知和聚合的网络结构来进行三维点云目标检测。
2019-08-02 14:18
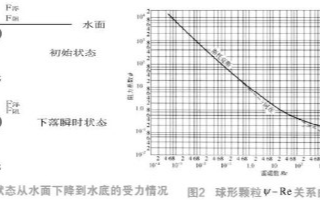
近年来,由于海洋防务和开发的需求,水下遥控技术越来越受重视。目前来看,在海水中传递信息、无线电波和光很容易被吸收并形成散射,而声波在海洋中的传播速度约为1530m/s,远远大于在空气中的340m/s的速度,并且衰减很小。所以声波是目前水中信息传输的主要载体,水声通信成为水下遥控信息传输的主要手段。
2020-03-02 10:08

ByteDance Research 也在进行 AI for Science 的研究,包括机器学习与量子化学、大规模量子化学计算、AI 制药等领域一些问题的研究,希望跟业界一起推动领域的发展。本文简要介绍我们这两年来取得的一些进展。也抛砖引玉,希望与业界进行更多的交流和合作。
2023-09-12 16:32

我们在ImageNet 的和CIFAR-10数据集上对HYPE 的性能进行了测试。当产生CIFAR-10时,像BEGAN这样的早期GANs在HYPE∞中是不可分离的:它们没有一个能产生令人信服的结果,证明这是一项比面部生成更困难的任务。
2019-06-23 10:08

LanguageMPC首次将LLM应用于驾驶场景,并设计了将文字形式高层决策转化为可操作驾驶行为的方法。我们定量的证明了LanguageMPC在路口和环岛等复杂交通场景中均优于现有基于学习和基于优化的自动驾驶系统。
2023-10-10 15:57
描述自动驾驶场景的条件是多维度的,包括:相机参数、物体框、路面地图以及对场景属性的语言描述(比如天气和时间)。如何将如此复杂的场景信息同时作为条件指导生成,是3D自动驾驶街景数据合成的重点问题。
2023-10-20 16:18
来自合肥工业大学、商汤、澳国立、北航、英伟达、港大和上海人工智能实验室的研究者提出了一项新的视听分割任务(Audio-Visual Segmentation, AVS)。
2022-08-08 10:23
