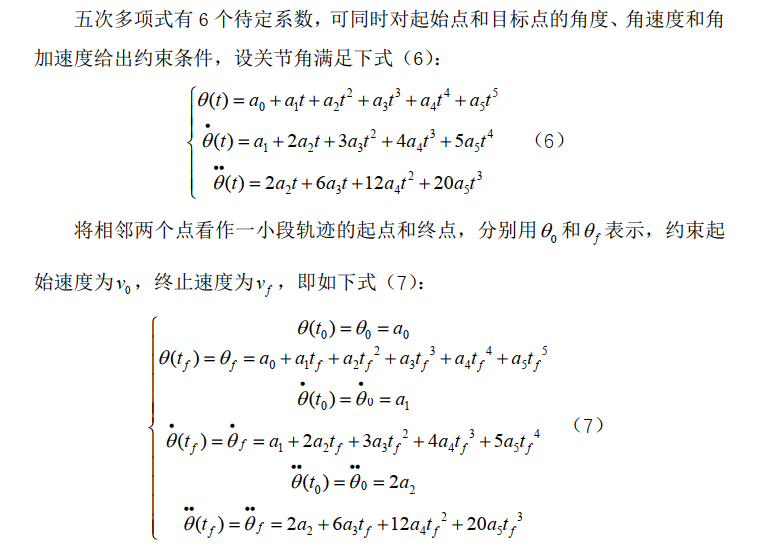
五次多项式插值法 五次多项式有6个待定系数,可同时对起始点和目标点的角度
2023-11-17 15:57

双三次插值又叫双立方插值,用于在图像中“插值”(Interpolating)或增加“像素”(Pixel)数量/密度的一种
2023-12-14 14:35
对串联机械臂而言,轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人的关节变量变换成跟时间的函数,然后对角速度和角加速度进行约束。 笛卡尔空间轨迹规划是把机器人末端在
2023-11-17 15:52

未来的趋势绝对是机器人代替人工作业,机械臂首当其冲。如今机械臂工业化已经比较成熟,许多人都开始对机械
2022-12-09 17:41
小机械臂进行解锁后,小机械臂在轨测试逐步展开。科研人员首先对机械臂的各项
2022-08-29 15:39
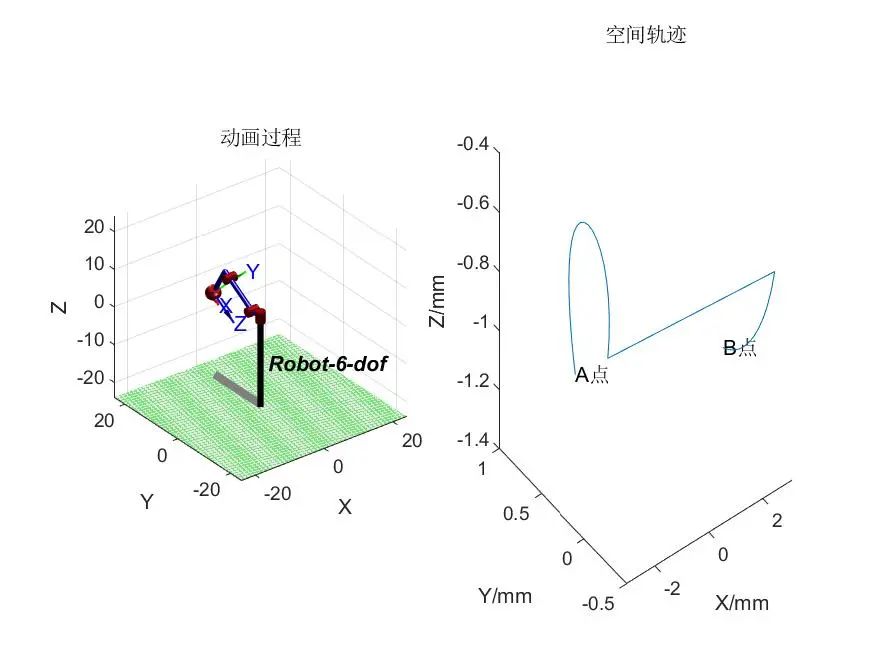
采用五次多项式插值法进行机械臂轨迹规划,基于Matlab Robotic
2023-11-17 16:11
柔性机械臂 刚性机械臂建模方法已经可以有效地求解出机械臂各部分之间的耦合
2023-11-17 17:12
刚性机械臂 机械臂建模是机械臂控制的基础,控制效果的好坏很大程度上决定于
2023-11-17 17:03
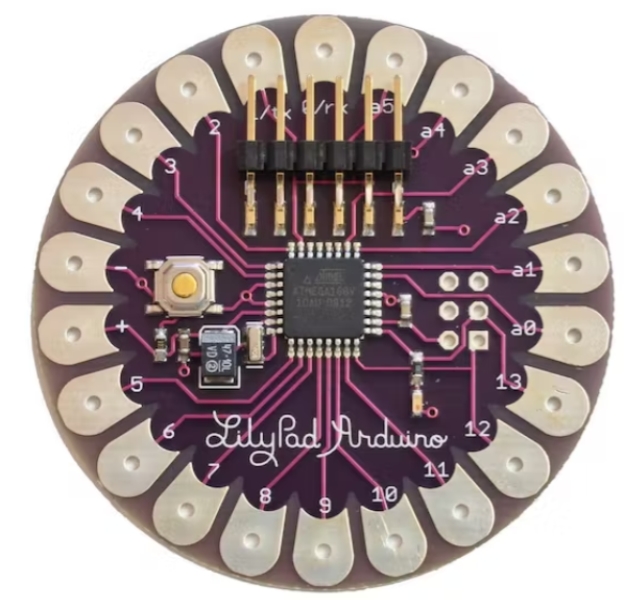
一种机械臂,可通过带有传感器的手套无线模拟您的手部运动。
2022-09-19 16:01
我计划最终为该机械臂创建3D模型,并在爪子和马达上进行扩展,以便实际上可以成为功能齐全的机械臂。
2019-10-09 09:31