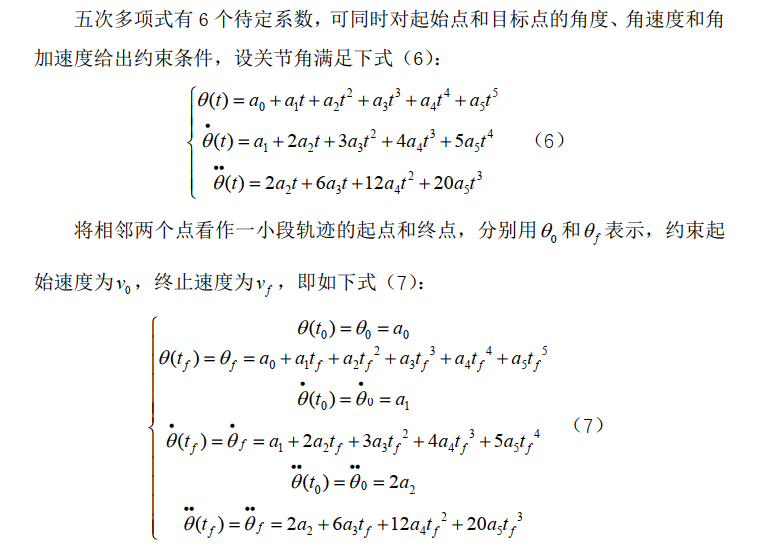
五次多项式插值法 五次多项式有6个待定系数,可同时对起始点和目标点的角度
2023-11-17 15:57
机械臂的运动轨迹是指通过给定的路径的起点与终点,以及机构本身或者机构运行所存在的约束条件,求出每个关节的位移S,速度v,加速a的完整过程。 文中采用笛卡尔空间的网弧插值
2017-11-03 10:26
针对一般结构的六自由度( DOF)机械臂逆运动学方程求解困难的问题,提出六维线性插值理论。首先,从大量的经验数据中搜索7个相邻的非线性相关的节点组成超体;然后,利用这7个节点得到六元一
2018-03-29 14:25

双三次插值又叫双立方插值,用于在图像中“插值”(Interpolating)或增加“像素”(Pixel)数量/密度的一种
2023-12-14 14:35
对串联机械臂而言,轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人的关节变量变换成跟时间的函数,然后对角速度和角加速度进行约束。 笛卡尔空间轨迹规划是把机器人末端在
2023-11-17 15:52
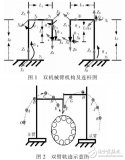
本章小结第三章机械臂控制系统介绍3.1 基于Arduino控制伺服电机系统3.1.1 机械臂结构3.1.2 系统供电3.1.3
2021-11-29 07:19
五轴机械手主臂的负载惯量是如何去计算的?五轴机械手主臂的负载转矩是如何去
2021-06-28 09:17

本文档的主要内容详细介绍的是三次样条插值的MATLAB程序。
2020-06-02 08:00

工艺流程2.3 本章小结第三章 机械臂控制系统介绍3.1 基于Arduino控制伺服电机系统3.1.1 机械臂结构3.1.2 系统供电3.1.3
2021-11-19 12:21
机械臂仿真,用什么软件效果比较好?
2018-01-18 16:50