
本文档内容介绍了多种机械结构的动态原理图介绍,供网友参考。
2017-09-19 14:32
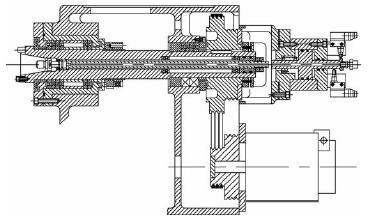
数控机床的机械结构 5.1 概述 5.2 数控机床的主传动系统 5.3 数控机床的进给传动系统 5.4 自动换刀装置 5.5 数控机床的主要辅助装置 5.6 数
2008-12-31 00:28
松下系列录像机机械结构原理检修与实例
2025-07-14 14:47
电工电子设备机械结构热设计规范
2021-09-12 10:41
M-710iC机械结构说明。 机器人不能单个进行作业,只有安装上机械手,构架起外围设备和系统才可进行作业。在考虑其安全性时,不能将机器人独立起来考虑,而应作为整个系统来考虑。在使用机器人时,务须
2023-02-13 09:45
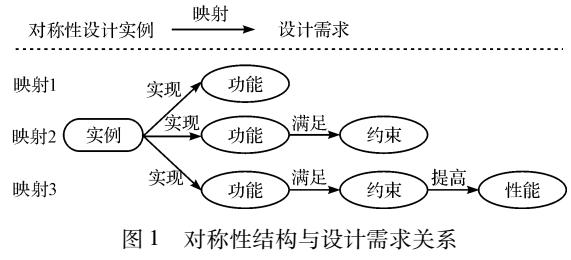
针对机械结构对称性实例中存在着大量的设计知识,利用多维模糊数据挖掘的方法从结构对称性实例中挖掘了设计知识,用以指导结构对称性在机
2018-03-10 10:49

电子发烧友网站提供《汽车门限位器实验台机械结构和工作原理.doc》资料免费下载
2023-10-25 09:59
此文将工业机器人结构、驱动及技术指标描述很为详尽,值得细看! 一、常用运动学构形 1.笛卡尔操作臂 优点:很容易通过计算机控制实现,容易达到高精度。缺点:妨碍工作, 且占地面积大, 运动速度低
2017-09-29 18:55

为解决机场升降平台车与飞机货舱轨道不易对接造成的集装箱装卸困难等问题,研制了万向滚轮,并将万向滚轮技术应用到机场升降平台车的传输装置中。对万向滚轮的结构和工作原理进行分析,建立了万向滚轮旋转方向
2018-03-13 14:02
介绍了一种开放式五轴焊接机器人的研制,叙述了焊接机器人的设计思想,机械结构,硬件组成,控制系统软件逻辑结构,主要软件模块,安全措施,焊接工艺参数等。实际运行表明,机器运行平稳安全,焊接质量稳定,并具有较高经济性。
2017-10-18 16:12