机械手臂结构优化设计!资料来源网络,如有侵权,将请见谅
2015-11-20 15:38
SOLIDWORK格式,可以看到整个机械手臂的工作原理
2017-03-24 17:08
单轴直线运动模组也称之为电动滑台,是自动化设备中必不可少的运动部件,通过单轴模组可以快速、方便地组合成各类样式的直角坐标机械手臂。直角坐标机械手臂在安装和运行过程过,有赖于正确的使用,方能保持最佳
2017-10-09 11:03
2015-06-16 15:24
电磁机械手臂驱动电路板之设计与实现本装置主要使用慧鱼电控积木来设计电磁机械手臂之机构,使用慧鱼电控积木来设计之原因为其质轻容易施工。另外在驱动部分使用直流
2009-11-17 18:06
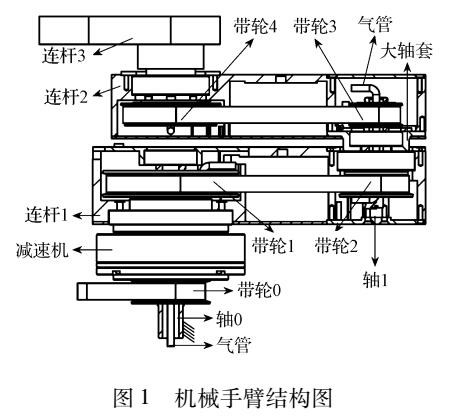
针对工业中片状材料自动化传输的应用需求和垂直方向占用空间小的要求,设计了一种成本低、工作空间大和占用空间小的自由度多关节机械手臂。该机械臂是一种3关节3连杆式机械结构,采用减速机和二级同步带进行传动
2018-03-20 14:52
基于动态方程和Hamilton-Jacobi 原理,从硬件到软件,设计了机器人机械手臂的关节驱动控制系统。主要任务是使该系统的能耗最小化。仿真和实验的结果,证明了该系统的可用性和
2009-05-27 13:10
在这个项目中;提供 3D 机械手组装、伺服控制、柔性传感器控制、使用 nRF24L01 进行无线控制、Arduino 接收器和发射器源代码。简而言之,在这个项目中,我们将学习如何用无线手套控制机械手
2022-12-20 15:55
2015-10-10 10:53

通常的机械臂都是由多路舵机组成,我使用的是某宝上(并不)常见的五自由度机械臂。尽管商家称它为六自由度。这里使用STM32F407VGT6的6路PWM输出通道来控制6个舵机的运动,树莓派(上位机)通过
2023-05-26 16:50