机器人视觉解决方案是我们实现机器人视野的几大挑战。即便变得越来越简单易用,还是有一些棘手的问题。很多因素影响机器人在环境中的视觉
2018-11-20 09:56
机器人视觉,计算机视觉,图像处理,机器视觉和模式识别之间有什么区别?知道哪一个是哪个会让
2020-01-22 17:20
如果对移动机器人视觉算法进行拆解,你就会发现获取物体深度信息、定位导航以及壁障等都是基于不同的视觉算法,本文就带大家聊一聊几种不同但又必不可少的视觉算法组成。
2018-09-18 14:32
首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列,然后在分析二次成像法获取目标深度信息的缺陷的基础上,提出了一种获取目标的空间位置和运动信息的方法。##目标的获取即在摄像机采集的图像中搜索是否有特定目标,并提取目标区域,给出目标在图像中的位
2014-12-29 14:23
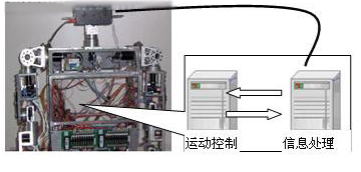
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,其中的视
2021-04-13 14:18
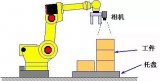
iRVision 2.5D 视觉堆垛 视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。 使用iRVisio
2018-03-15 16:07
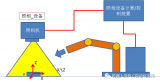
首先要建立机器人的轨迹,作为基础机器人编程轨迹.
2023-08-02 11:03
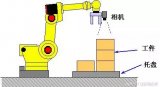
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2018-03-15 11:06
机器人视觉伺服系统是机器视觉和机器人控制的有机结合,是一个非线性、强耦合的复杂系统,其内容涉及图象处理、
2019-05-03 10:32

与直接计时的D-TOF不同的方案是间接TOF(I-TOF),时间往返行程是从光强度的时间选通测量中间接外推获得。I-TOF不需要精确的计时,而是采用时间选通光子计数器或电荷积分器,它们可以在像素级实现。I-TOF是目前基于TOF相机的电子和光混合器的商用化解决方案。
2023-10-22 09:57