
FANUC机器人建立part carrier和跟踪参数的方法
2020-08-31 09:11
移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。目标的实时识别与定位是足球机器人在足球赛中精确
2016-09-19 11:18
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,其中的视觉系统通过无线局域网
2021-04-13 14:18
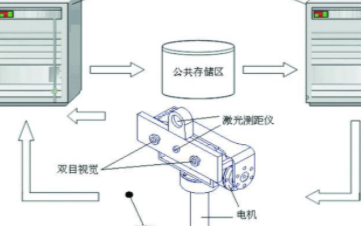
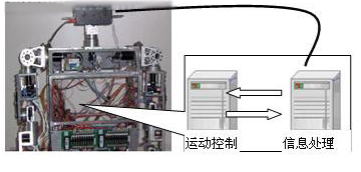
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,然后论述了基于立体视觉的信息处理和头部运动控制,
2021-04-13 12:00

3D多目标跟踪(3D MOT)在各种机器人应用中发挥着关键作用,例如自动驾驶车辆。为了在驾驶时避免碰撞,机器人汽车必须可靠地跟踪
2024-10-28 10:07

移动式机器人的控制系统的作用是生成控制信息,控制机器人的执行机构进行运动。跟踪设定轨迹是设计移动机器人的一项重要任务,其工作过程根据设定好的路线转为运动控制信号传输给
2019-06-12 14:49
协作机器人只是整个工业机器人产业链中一个非常重要的细分类别,有它独特的优势,但缺点也很明显:为了控制力和碰撞能力,协作机器人的运行速度比较慢,通常只有传统机器人的三分之
2019-07-07 09:47
机器人的研发是为了协助或取代人类进行危险的工作,目前大部分的机器人都还是硬邦邦的“硬汉”形象。人们也在拓展自己的想象和创造力,去开发像“大白”一样软萌的机器人。这种利用柔软材料来制作的
2018-05-17 23:58

本文旨在介绍使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验的详细流程,包括实验平台搭建过程、数据处理过程以及SLAM估计评估方法。 由于涉及知识较多,部分内容只
2023-06-13 09:24
很多机器人的研究目标很多是模拟人的智能,所以研究人的控制系统,对于机器人有很大的借鉴意义。
2018-07-06 10:35