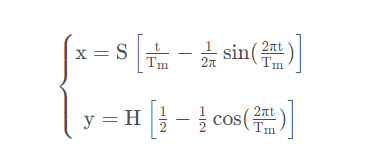
1、摆动相轨迹设计 基于第二节中提到的原则,文献[1]中提出了一种基于复合摆线形式的轨迹规划方法,并在文献[2]中得到了验证和使用。 针对机器人足底与地面接触时会产生滑
2023-11-22 11:43
一般而言,多轴机器人的任务一般是通过控制末端工具的位置和姿态来完成,会涉及位置和姿态两个量 , 所以在轨迹规划时需要考虑二者的时间同步 即在同一规划时间内
2023-11-10 16:40
机器人技术基础系列:规划与导航 概览 自主移动机器人的规划与导航包括利用有目的的抉择制定和执行来使系统实现最高级的目标。
2010-03-11 12:10

自动化技术的不断进步,焊接机器人是提高生产效率和焊接质量的重要工具。而焊接机器人拖拽轨迹的设置则是确保焊接精准性和一致性的重要环节。今天跟随创想智控焊缝跟踪系统小编一起了解焊接
2024-09-11 17:10
提高工业机器人轨迹精度很大的一部分原因就是为了满足现阶段国产机器人的发展需求。 在2018年之前,国产工业机器人主要的集中于搬运、上下料、分拣、焊接等应用领域,国产
2022-10-31 17:53
移动这一简单动作,对于人类来说相当容易,但对机器人而言就变得极为复杂,说到机器人移动就不得不提到路径规划,路径规划是移动机器人
2019-09-06 21:34
让我们从移动机器人运作的流程中来看待规划的作用。
2023-03-08 16:55
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划
2021-10-14 14:38
规划与控制同时还是实践性非常强的学科,技术只有在真正的机器人调试,优化中不断锤炼才能得到提升。
2023-12-20 10:56
如果处理中断例程的时间短于主程序中制定的轨迹规划,则机器人可不中断而继续运行。如果中断例程所需的时间长于规划的轨迹,则
2022-03-11 14:04