
机器人技术处于工业 4.0、人工智能和边缘革命的前沿。让我们看看如何创建 FPGA 控制的机器人手臂。
2023-10-24 17:15

ABB工业机器人有随机光盘手册,是使用及维护必须要参考的资料,但是内部手册较多我们不可能都使用到,如何快速找到自己需要的资料呢?别急和我一起来学习怎样使用ABB工业机器人手册吧!
2019-05-24 17:44
ABB工业机器人有随机光盘手册,是使用及维护必须要参考的资料,但是内部手册较多我们不可能都使用到,如何快速找到自己需要的资料呢?
2018-06-28 14:46
机械手搭载双目相机,手眼标定。
2023-04-20 16:32
部件的材料成分也将是夹持方案的一个非常重要的方面。尺寸和重量可以由夹具来处理,材料也需要与夹具相容,以确保抓紧部件。例如,一些抓手不能用于处理易碎物品(例如陶瓷,蜡,薄金属或玻璃等),容易损坏物品。但是对于我们的自适应夹具,抓取表面可以适当减少对易碎部分表面的影响,因此力控制夹具也可以成为解决方案的一部分。
2018-07-13 17:29
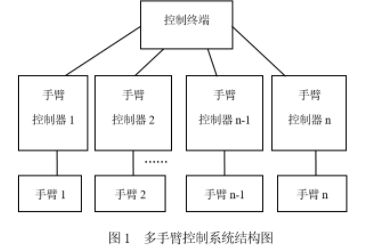
近年来,随着MEMS及相关技术的发展,微机器人领域已越来越来受人关注。但由于零件的尺寸很小,微机器人组件的装配需要很高的精确度,一般的装配方法无法满足要求。本文介绍了一个可进行微零件装配工作的机器人手臂控制系统的控制
2021-04-07 09:24
不过,比萨大学(University of Pisa)和意大利理工学院(Italian Institute of Technology)的研究人员已经开发出一种极其简单、但功能惊人的机器人手,名为
2018-09-11 15:33
便携式移动机器人手持监控系统,基于嵌进式PC/104plus总线结构,由视频图像监视、状态信息监测、远控指令、无线通讯、数字舆图交互及全局路径规划六大模块组成。各模块通过接口实现信息交换与数据共享
2014-03-27 11:31
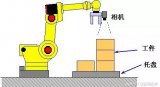
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
2018-06-13 17:16
作为现代运动控制领域的核心单元,伺服驱动系统可以实现高精度的传动定位,主要包括伺服驱动器和伺服电机两部分,伺服驱动器接收上位机的指令(速度、位置和力矩),再把上位机指令发给伺服电机,从而实现运动的控制。
2018-08-24 15:12