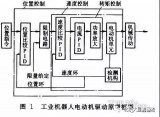
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。
2018-11-21 16:17
工业机器人关节转速不高。机器人关节角速度很低,可电机在极低的速度下转动是不平稳的,控制不易,需要一个机械让电机在较合理的转速下运动,保证运动的平顺。
2018-06-01 14:54
现今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让
2016-10-27 18:31
在机器人系统中,为什么不能直接控制伺服电机转子转速控制关节运动,为何还需要减速器?
2019-05-09 16:13
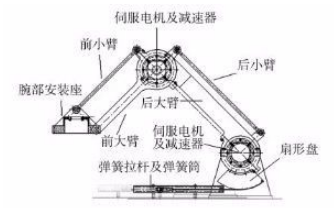
关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业
2018-10-03 12:44
关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。
2019-05-21 17:19
关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。
2018-07-13 10:01
轴的数量或自由度描述了机器人手臂或身体如何操纵。轴数的一个很好的指标是关节的数量;关节越多,自由度就越高。但是,轴和关节并不总是1:1的比例;这取决于每个
2018-01-10 15:26
若以机械结构来看,工业机器人可区分为单轴机器人、座标机器人、水平多关节机器人(SCARA)、垂直多
2018-09-24 09:51
