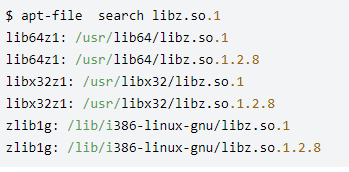
虚拟机:Ubuntu查询安装文件位置和未见所在的package
2020-06-22 16:19
机器人的研发是为了协助或取代人类进行危险的工作,目前大部分的机器人都还是硬邦邦的“硬汉”形象。人们也在拓展自己的想象和创造力,去开发像“大白”一样软萌的机器人。这种利用柔软材料来制作的机器人,被称为软体机器人,在研究领域颇受关注。
2018-05-17 23:58
随着城市辅助驾驶大规模落地,激光雷达车型由于能实现更全面的智能驾驶而备受关注。比如,理想汽车前不久宣布在北京和上海开启「城市 NOA」内测,下半年将开放全国都可用的「通勤 NOA」,媒体和用户试驾已启动。 使用这两项 NOA 导航辅助驾驶有一个共同的要求,就是需购买搭载激光雷达的 MAX 版本车型。这枚来自禾赛的超高清远距激光雷达 AT128,内部集成 128 个激光器,实时为车辆感知每秒 153 万点的 3D 空间数据,全局分辨率高达 1200 x 128,可实
2023-07-03 15:45
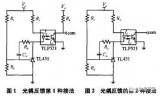
在一般的隔离电源中,光耦隔离反馈是一种简单、低成本的方式。但对于光耦反馈的各种连接方式及其区别,目前尚未见到比较深入的研究。
2018-05-23 14:37
人工智能和虚拟现实技术都提供了人们在数字营销领域从未见过的潜力。随着企业开始了解其潜力,并看到这些新技术对其业务的直接影响之后,越来越多的企业将采用人工智能和虚拟现实。
2018-01-24 13:51
Waymo的技术,需要一遍又一遍地测试小的变化,同时创造出汽车从来未见过的场景,这是自动驾驶技术梦寐以求的目的,在现实世界很难实现,但是在Carcraft,就非常容易做到。
2018-08-22 08:59

为了测试这种方法对于环境突变的适应能力,研究人员首先在仿真机器人系统中进行了实验。研究人员在相同扰动下的环境中多所有主体进行了元训练,而在主体从未见过的环境及变化中进行测试
2019-05-10 09:47
该团队在机器人使用电钻选择三个可能目标的任务中展示了该系统。重要的是,他们展示出该系统对于系统从未见过的人身上同样奏效,这意味着组织可以在现实环境中部署该系统,而无需针对用户训练它。
2018-06-22 11:12
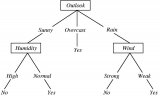
我们知道决策树容易过拟合。换句话说,单个决策树可以很好地找到特定问题的解决方案,但如果应用于以前从未见过的问题则非常糟糕。俗话说三个臭皮匠赛过诸葛亮,随机森林就利用了多个决策树,来应对多种不同场景。
2019-04-19 14:38
如果你想要机器人抓取更多的物体,甚至是从未见过物体那要怎么办呢?AutoLab的科学家们在过去几年一直致力于这方面的研究,并开发出了一款称为Dex-Net的框架,来帮助机器人识别并抓取不同形状的物体。
2018-08-10 08:57