针对复杂环境下仿人机器人稳定控制的要求,设计了基于MEMS 惯性传感器的仿人机器人足部姿态实时感知系统。同时,提出了基于惯性传感器和足部力传感器信息的系统累积误
2010-01-20 14:09
本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
2009-05-25 15:57
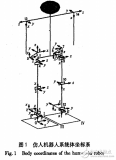
仿人机器人 THBIP-I及其步态 (HumanoldrobotTHBIP,Iandits@alkinggait) 清华大学 自主研制的仿人机器人 呻 IP--重约 1
2017-09-16 09:14
仿人机器人复杂动作设计中人——体运动数据提取及分析方法(1)
2016-05-30 15:08
摘要:针对小型仿人机器人的零力矩点(ZMP)轨迹在线确定问题,设计了一种基于多个简单一维力/力矩传感器的脚底传感阵列系统以及一种距离可调的多孔、双夹板机构,用以安装力/力矩传感器,并实现了脚底传感器信号多级放大及采集软硬件系统。应用CAN总线接口实
2011-02-08 15:52

电子发烧友网站提供《基于SSVEP仿人机器人异步脑机接口控制系统.pdf》资料免费下载
2023-11-03 09:34
目前仿人机器人的研究与应用碰到了诸如:大计算量、海量存储的需求、实验设备投入大、科研人员的协作和成果融合困难等问题。而网格具有超级计算能力、海量的存储容量、能
2009-08-04 08:50
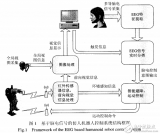
的远程传送,使该仿人机器人系统具有脑电控制、语弃交互、游戏手柄交互、机器视觉与避障等功能。通过SSVEP 空闲状态检测实验验证了脑机接山系统异步控制的有效性。 2系统总体设计(System overall desig
2017-10-23 15:08
仿人机器人混联灵巧手臂设计及运动学逆解研究_秦利
2017-01-08 11:20
论述了由嵌入式计算机组成的3 层仿人机器人控制系统,并详细介绍了其中的关节控制器。控制系统实行逐级控制,任务分散,提高了机器人的智能化程度。关节控制器选用TM320F2811
2009-08-05 10:51