智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心展开,如我国的“飞思卡尔”杯全国大学生智能车大赛,以及吸引亚太地区众多国家参赛的亚广联(ABU)机器人
2021-04-07 09:24
“飞思卡尔杯”智能车大赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCSl2单片机为核心的大学生课外科技竞赛。组委会提供一个标准的汽车模型、直流电机和可充电式电池
2020-05-03 11:23
本文设计并实现一种基于机器视觉的智能车系统。该系统基于目标物体的颜色,采用颜色识别、图像去噪、轮廓检测等算法准确地识别并定位目标物体。另外,智能车的运动控制系统采用STM32F4处理器完成车体方向移动以及机械臂抓取物体功能。整个设计结合了机器视觉识别技术、网络数据
2022-10-12 16:08
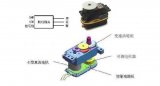
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。本文介绍了舵机的原理和控制,另外还详细介绍了智能车舵机控制算法。
2018-05-11 10:22
避撞功能是智能车的最基本保护能力,Jetbot 使用深度学习的图像分类技术来模拟人眼习惯实现这个功能,但这只是智能车所展现的最入门应用而已,接下去就要提升到“循路”的功能,跟着指定路线去前进,才是真正进入有实用价值的应用。
2022-02-17 12:00
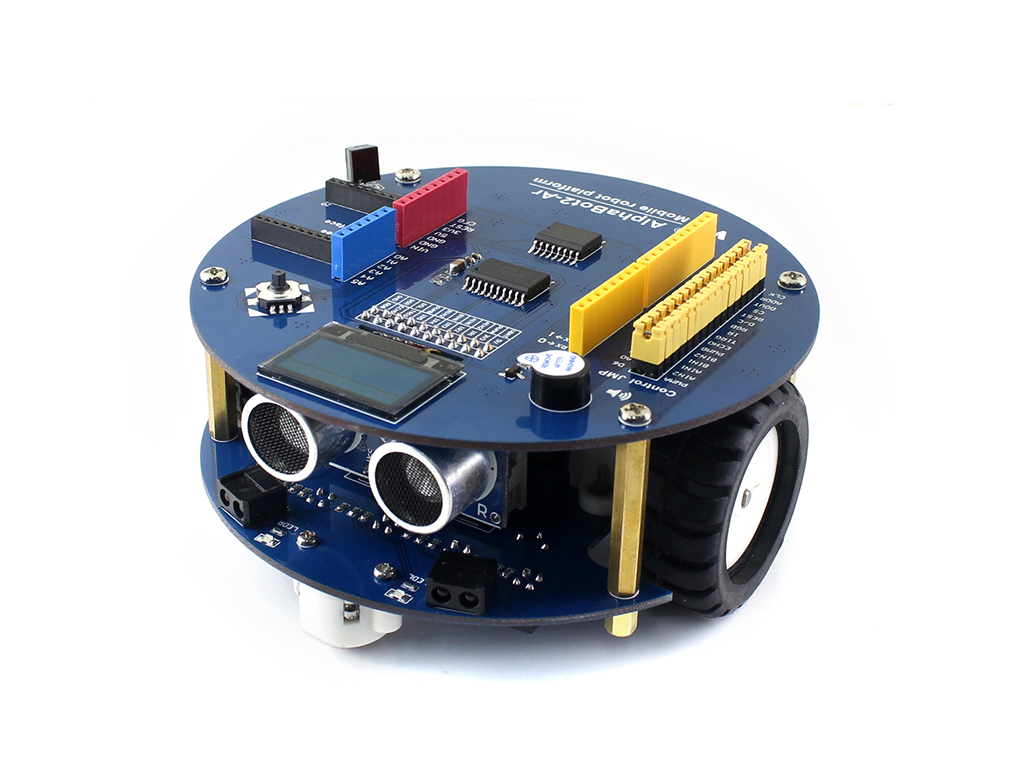
智能车 机器人 Arduino AlphaBot2 智能车学习板 基于Arduino开发设计 采用UNO PLUS 可以实现循迹、避障、超声波测距、红外遥控和蓝牙控制等应用 型号 AlphaBot2-Ar
2019-12-24 16:01
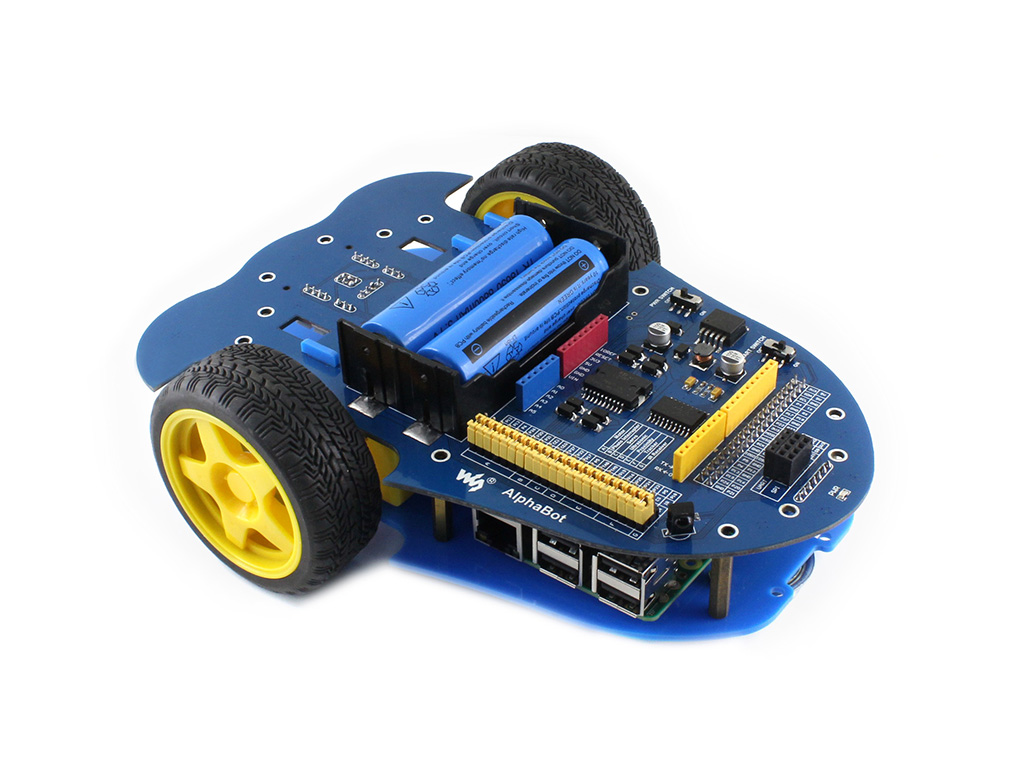
我是个智能车开发套件,主要包括AlphaBot底板和智能车底盘,支持接入树莓派和Arduino。
2019-11-11 14:32
智能车 机器人 Arduino AlphaBot2 智能车配件包 基于Arduino开发设计 采用UNO PLUS 可以实现循迹、避障、超声波测距、红外遥控和蓝牙控制等应用 型号 AlphaBot2-Ar配件包
2019-12-24 15:30
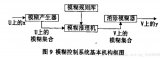
本文首先介绍了模糊控制算法的概念,其次介绍了模糊控制的工作原理,最后详细介绍了基于模糊控制算法的智能车转向舵机控制。
2018-05-11 10:48

前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础。
2018-07-12 03:55