
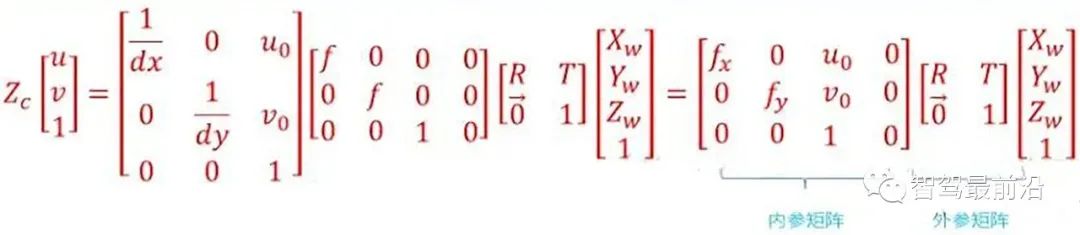
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像
2020-08-28 11:42

随着汽车电子技术的发展,电子控制单元(ECU)的标定已成为汽车电子控制装置开发的一个重要环节。大多数ECU都需要经过匹配标定的过程,从而确定其运行参数和控制参数。目前国
2020-04-26 10:04
因为相机成像的模型比较复杂,所以依赖于一张图像来标定相机是不可靠的。但是我们可以把世界坐标固定在标定板上,通过转动和平移标定板来得到多幅不同的
2022-11-22 10:34

这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00
标定传感器是自动驾驶感知系统中的必要环节,是后续传感器融合的必要步骤和先决条件,其目的是将两个或者多个传感器变换到统一的时空坐标系,使得传感器融合具有意义,是感知决策的关键前提。任何传感器在制造、安装之后都需要通过实验进行标定,以保证传感器符合设计指标,保证测量值
2023-05-29 18:16
传感器静态标定的主要步骤通常包括以下几个方面: 一、准备阶段 确定标定范围 :首先,需要明确传感器的全量程(即测量范围),这是标定工作的基础。 准备标准设备 :利用标准仪器或设备产生已知的非电量(如
2024-09-19 17:02

在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为相机需要聚焦在特定的距离上标定。改变焦距长度会轻微地影响对焦距离,这会影响之前的标定。即使是光圈的改变通常也会对
2023-11-25 14:36
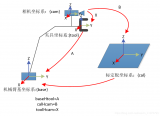
机械手搭载双目相机,手眼标定。
2023-07-11 11:18
相机标定可以归纳为P−n−P(Perspective-n-Point)的问题,即已知三维物点坐标和对应的二维投影坐标,求解相机参数。由于镜头的畸变(径向和切向)带来非线性成像模型,一般求解方法分为两步:
2022-12-21 09:52
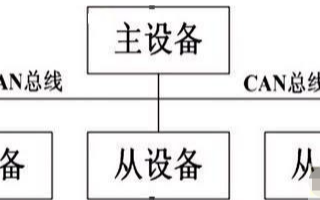
CCP协议定义了两种工作模式:一种是Polling(查询)模式,另一种是DAQ(数据采集)模式。在本文所设计的标定系统中,根据实际需求情况,采用了DAQ模式。
2021-04-12 09:54