本文介绍了强化学习与智能驾驶决策规划。智能驾驶中的决策规划模块负责将感知
2023-02-08 14:05
有了全局路径参考信息,有了局部环境信息了,有了行为决策模块输入的决策信息,下一步自然而然的就要进行运动规划,从而生成一条局部的更加具体的行驶轨迹,并且这条轨迹要满足安全性和舒适性要求。
2023-04-17 09:46
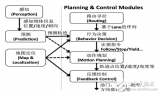
无人车作为一个复杂软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知预测,以及控制规划等多个模块的协同配合工作。作者认为最关键的部分是感知预测和决策控制规划的紧密配合。狭义上的决策
2017-11-12 11:30
在基于规则的方法中,有限状态机(FiniteStateMaechine,FSM)成为最具有代表性的方法。2007年斯坦福大学参加DARPA城市挑战赛时的无人车“Junior”,其行为决策采用的就是有限状态机方法。
2023-04-12 10:09
车辆自主驾驶系统从本质上讲是一个智能控制机器,其研究内容大致可分为信息感知、行为决策及操纵控制三个子系统。路径规划是智能车辆导航和控制的基础,是从轨迹
2020-07-28 09:04
如果说过去是算法根据芯片进行优化设计的时代,那么英特尔对 Mobileye 的收购,预示着一个新时代的到来。
2018-10-18 09:30
AI-DSS 的优势往往体现在提高态势感知能力和加快决策周期上。下文将根据人工智能系统和人类的局限性,并结合现代冲突的规划过程,对这些说法进行解读。
2023-10-31 14:42
使运动规划流程的速度提升了三个数量级
2019-05-22 14:53
至关重要,它是汽车变得更“聪明”的关键。 然而,关于智能驾驶引发的事故我们也已经看到太多,这些教训也在告诫我们,我们需要更加安全的智能驾驶,需要更多精准的数据为安全保驾护航,能够在
2020-12-20 11:28
汽车线束汽车电路的网络主体,没有线束就没有汽车电路。随着人们对汽车安全性、舒适性、经济性、排放性要求的发展,汽车线束越来
2022-11-04 14:26