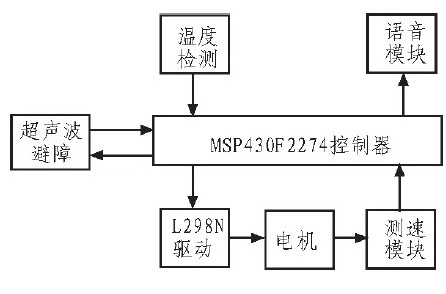
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由
2018-10-23 15:43
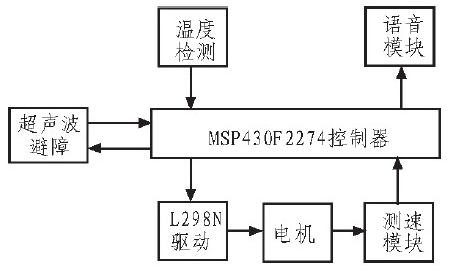
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由
2019-10-04 17:15
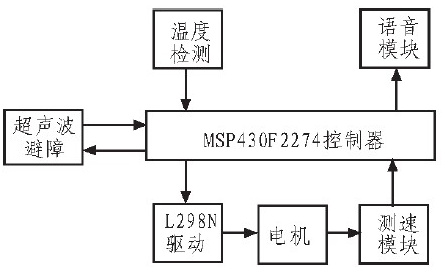
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由
2020-01-06 15:29
智能小车可以按照预先设定的模式在一个环境里自动工作,无需人为管理。智能小的驱动来源于微型直流电机,对于微型
2020-06-25 18:37
设计了一种智能循迹小车,介绍了系统总体,STC12C5A60S2 单片机为智能小车控制核心、电源模块、电机
2017-04-19 14:14
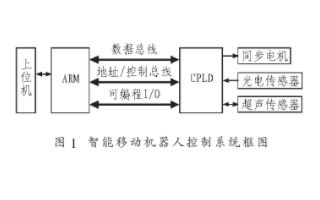
该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个
2020-03-29 10:44

优质橡胶轮子(65mm)集重量轻、抓地力强、耐磨性好等优点于一身,是DIY各种寻迹小车和轮式机器人的首选。
2019-12-10 14:11
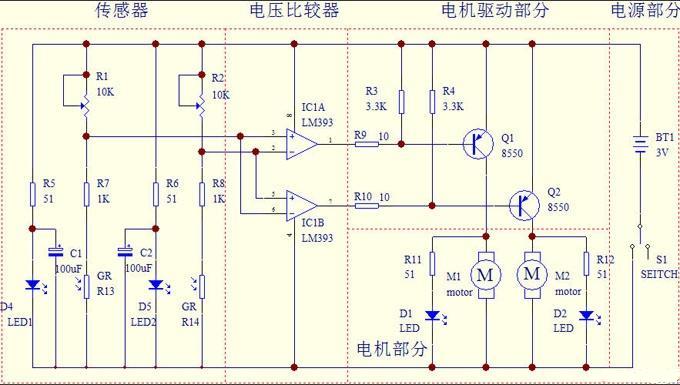
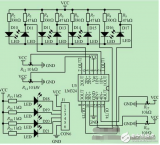
红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,
2014-04-29 15:13

本文设计方案以MSP430单片机为系统的控制核心,采用反射式光电传感器模块寻迹,实现智能小车的自动寻迹行驶。在实验中采用与白色相差很大的黑色引导线作为智能小车的既定路线
2013-09-30 10:05
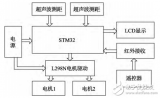
本文主要介绍了一种基于STM32的可遥控智能跟随小车的设计与实现,采用了超声波测距、电机驱动、红外遥控等功能模块设计。STM32连接了LCD显示模块和红外接收电路,分别
2017-12-23 14:47