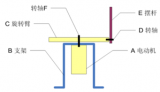
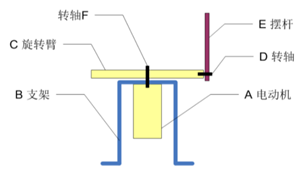
概述 机器人运动系统式一套高复杂性、高耦合性、驱动力小于机体物理自由度的非线性系统,为了实现机器人在空间中稳定的运动姿态控制,本设计把机器人运动系统在空间中的运动形式等效成了旋转倒立摆模型,基于该
2021-01-08 11:37
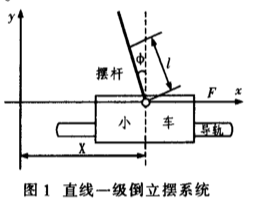
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆
2017-11-27 16:36
硬件依托于ART-PI开发平台,主控芯片采用STM32H750高性能单片机,同时采用TB6612芯片作为旋转倒立摆的核心动力驱动,采用霍尔传感器作为速度采集,采用高精度电位器作为
2021-02-25 16:44
概述 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中
2010-08-05 15:26
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的
2020-05-03 18:11

倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种
2020-05-03 10:29

引言 倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、
2009-01-01 21:05
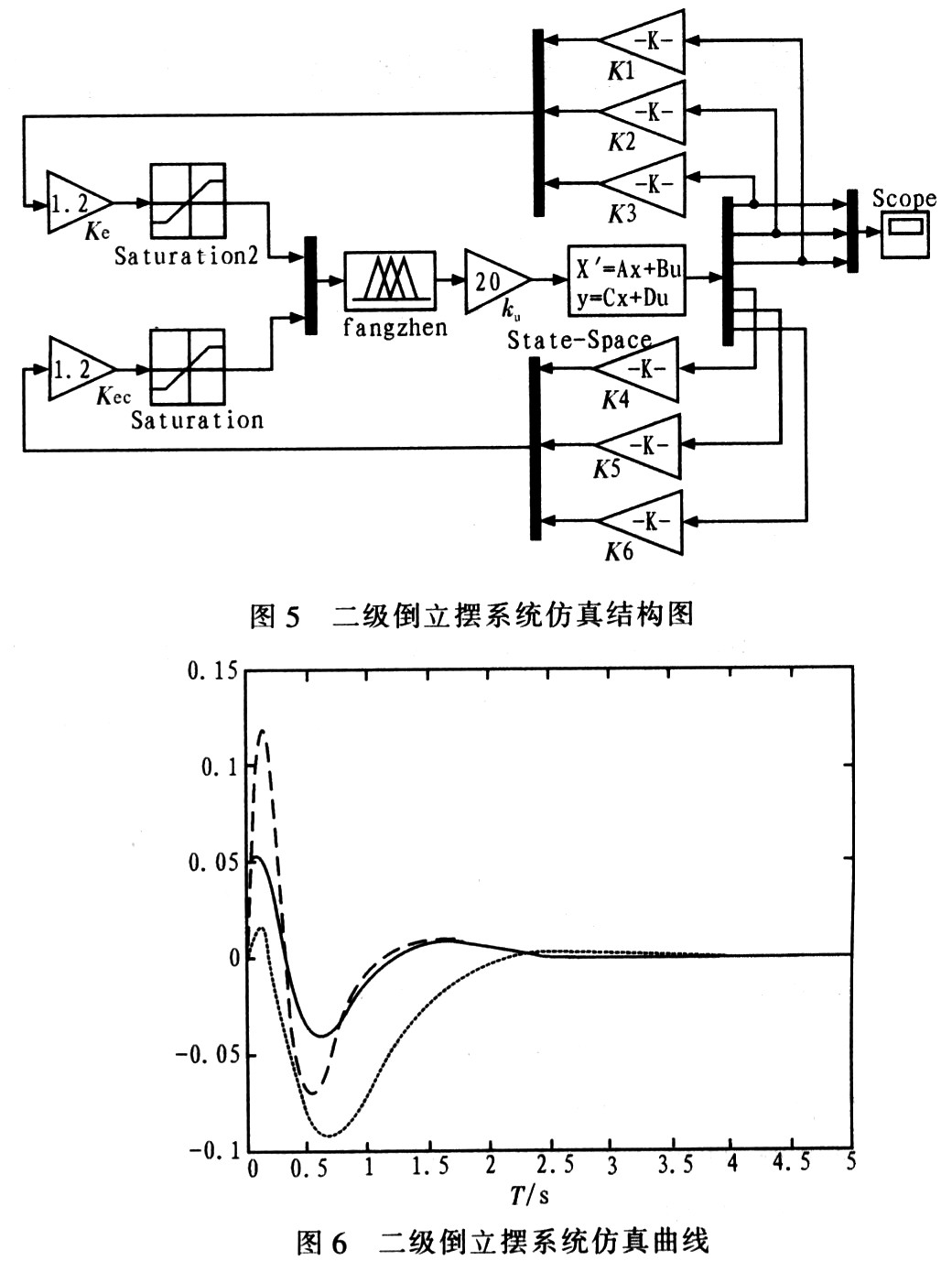
二级倒立摆的模糊控制研究 1 引言 在控制理论发展的过程中,某一理论的正确性及实际应用中的可行性都需要一个按其理论设计的控制器控制一个
2009-12-23 09:53

自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实
2019-08-23 08:05

倒立摆系统的整定是自动控制理论中的典型问题,在网路上或者书籍中可以找到不少相关的资料知识,整定算法也多式多样,模糊PID、LQR、以及本文用到的PID等。
2023-12-08 14:05