控制环节与控制量 整个系统的控制器就是偏差处理函数,方向环多为离散的PD控制器(PD
2023-11-14 16:47
伺服电机是一种高精度、高响应速度的电机,广泛应用于自动化设备、机器人、数控机床等领域。伺服电机的控制方式有很多种,其中正负脉冲方向控制是一种常见的控制方式,通过
2024-06-12 10:13

方向控制 典型环节对应 由于车模结构的不同,小车方向控制的各环节会有所区别,例如L车、B车的执行结构只有舵机;F车、E车的执行机构只有驱动轮; 而C车的执行机构既有舵机
2023-11-14 16:40
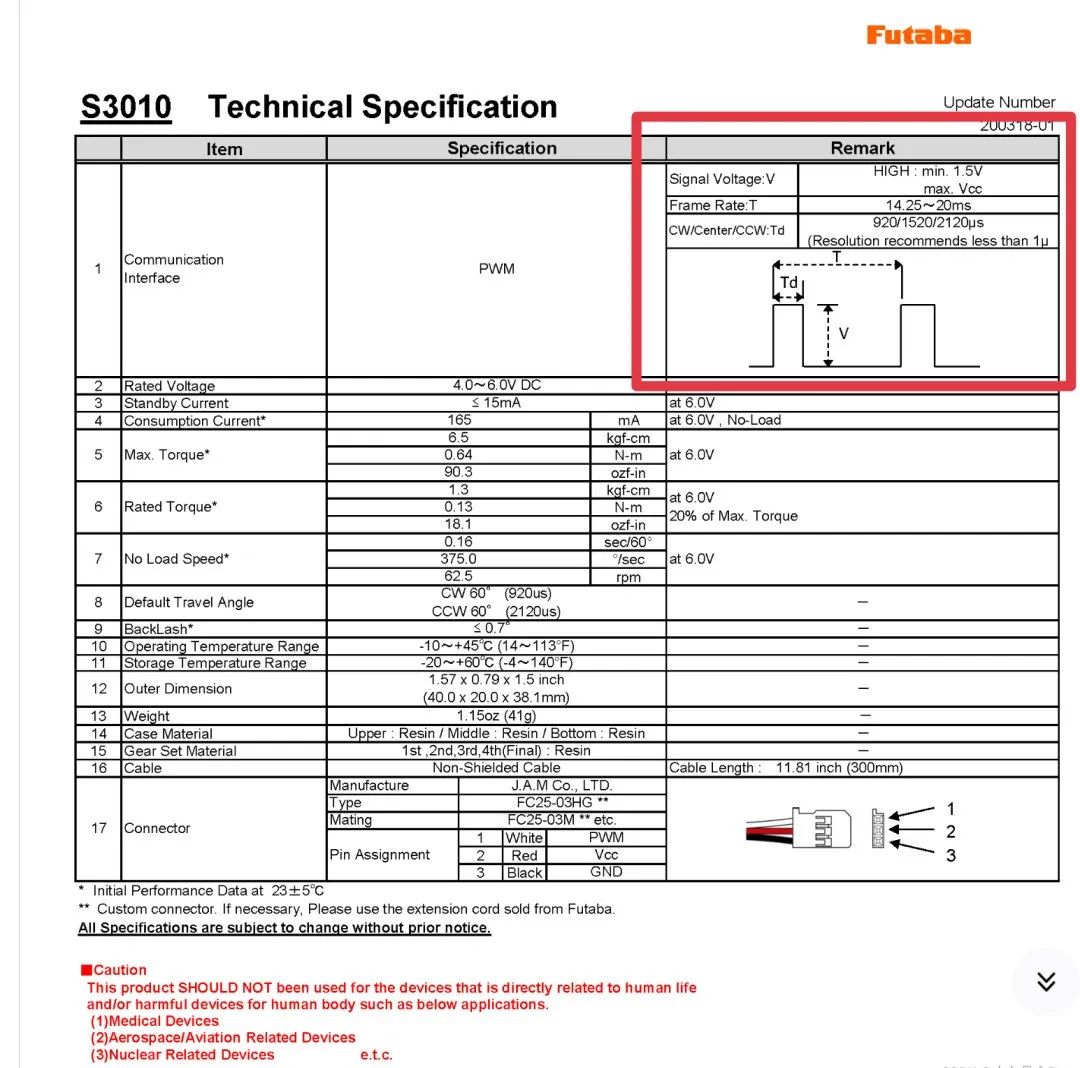
舵机中值及限幅 S3010舵机位于理论中值时一个周期的高电平时间应该为1.52ms由此可得占空比为7.6%,由此可以推算出单片机的对应占空比值,假设pwm时钟频率为30Mhz 则:计时20ms需要计数30 000 000/1000×20=600 000次 Duty= 7.6%×周期为10ms时的总计数值 (一个周期需要计数300 000次) 则舵机理论中值对应的PWM高电平计数个数为:Duty_mid=45 600; 注意一定是让舵机到达理论中值后再安装转向机构,还需要借助按键找出舵机的左右极限值,并且在程序内部要写限幅,保护舵机
2023-11-14 17:05
称为电机驱动器或电机控制器的东西。根据电机类型和所需控制类型,电机驱动器的类型也会发生变化。在本文中,我们将仅关注直流电机以及如何使用具有最流行的H桥拓扑的电机驱动器来控制直流电机。这种技术将帮助我们驱动小型或大型直
2022-12-01 13:36
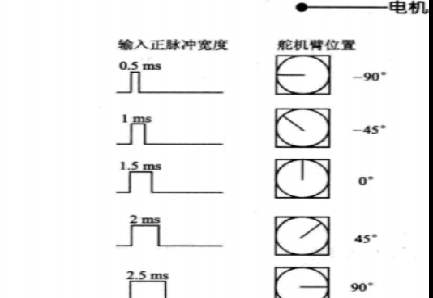
舵机 舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小车方向。 例如C车的S3010舵机,它需要使用周期20ms(50Hz)的PWM驱动,高电平
2023-11-14 16:54

磁阻传感器提供的输出信号几乎不受磁场变动、磁温度系数、磁传感器距离与位置变动影响,可以达到高准确度与高效能,因此相当适合各种要求严格的车用电子与工业控制的应用。
2024-04-11 09:34
,都是三线串口,提供RXD、TXD、GND这3路信号。为了提高电路的抗干扰能力,实际RS485串口应用中,客户可能需要使用RTS#硬件方向控制
2020-01-16 10:21

使用,也可以连接自己的串口外设。 EM9x60的TTL串口除了ttyS1以外,都是三线串口,提供RXD、TXD、GND这3路信号。为了提高电路的抗干扰能力,实际RS485串口应用中,客户可能需要使用GRTS#硬件方向控制。英创为此提供的方案是:使用板载GPIO作为
2020-01-17 08:59
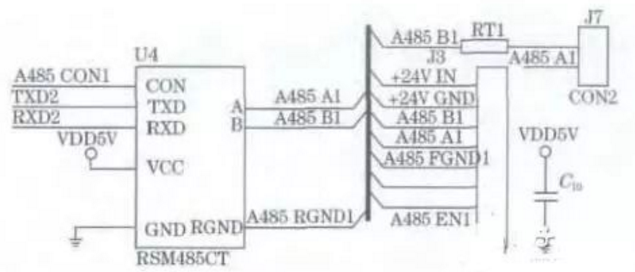
驱动程序的修改,使的在通过该修改后的串口驱动程序发送数据时,自动控制IO来实现RS485通信的方向控制,从而简化了RS485通信的控制流程,Linux下RS485通信程
2018-01-01 08:20