电子、电子信息专业电路单片机学习教程资料——新手平衡小车的卡尔曼滤波算法总结
2022-05-11 17:20

随着数据流的广泛运用,数据流中异常数据的检测问题也引起了更多的关注。现有的卡尔曼滤波算法需要的历史数据量虽然小,但只适用于单个异常点的检测,对于复杂连续的异常值检测效果较差。针对这个问题,提出一种
2017-12-29 10:10
最近研究STM32的自平衡小车,发现有两座必过的大山,一为卡尔曼滤波,二为PID算法。 网上看了很多关于卡尔曼滤波的代码,感觉写得真不咋地。一怒之下,自己重写,不废话,
2017-12-05 15:00
本研究之主要目的是將雙輪自走車系統利用強健之適應性控制,使 自走車能夠快速的達到平衡且定位不再搖晃,其主要的平衡方法為利用 直流馬達藉由輸入正電壓或負電壓產生
2016-06-03 16:57
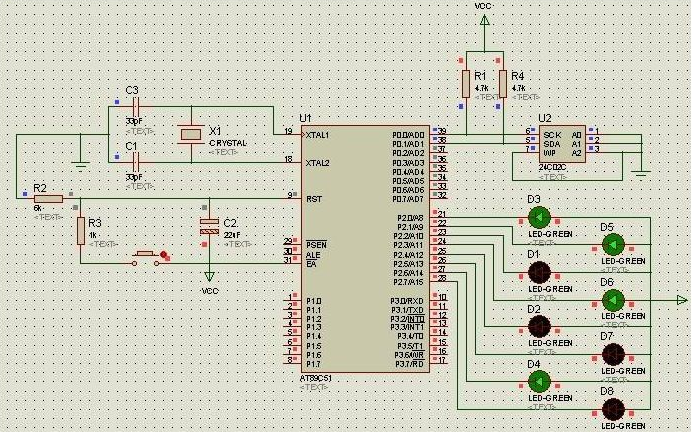
本文档的主要内容详细介绍的是使用51单片机实现MPU6050的卡尔曼滤波算法代码免费下载 。
2019-08-20 17:31
S.O.S 二維的提升式小波濾波器的verilog code
2014-06-27 09:08
MPU6050陀螺仪的卡曼滤波程序,已经实际用上,可以给大家参考下。 个人感觉还是挺有用的。
2016-02-01 15:13
最近正在学习卡尔曼滤波算法,用LabVIEW仿照C语言写了个一维的卡尔曼滤波程序,不知写的对不对,发上来希望大家指正。
2017-10-21 21:15
蜂窝网无线定位技术中,非视距(NLOS)误差的存在使得蜂窝网无线定位技术的定位精度急剧下降。针对NLOS 环境,对基于卡夫曼滤波的动态跟踪定位算法进行了改进。首先引入判
2010-01-15 14:11
本帖最后由 逸興遄飛 于 2016-4-17 15:37 编辑 cannon入門之Jlink調試總結:昨晚發的帖子,好像還在審覈,現在有壇友問我是怎麼解決的,那就不怕幸苦,再碼字一邊。1、瞭解
2016-04-17 15:26