PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两
2018-02-26 14:19
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
2018-09-14 09:01
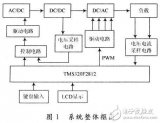
改善系统的动态响应特性;外环采用瞬时值的数字PI算法,输出电压的瞬时值信号直接反馈,与参考正弦电压比较,使输出电压稳定在设定值上,并抑制输出电压的畸变。两种控制算法能互相弥补各自控制上的不足,使系统得到较好的控制效果。
2018-07-04 07:35
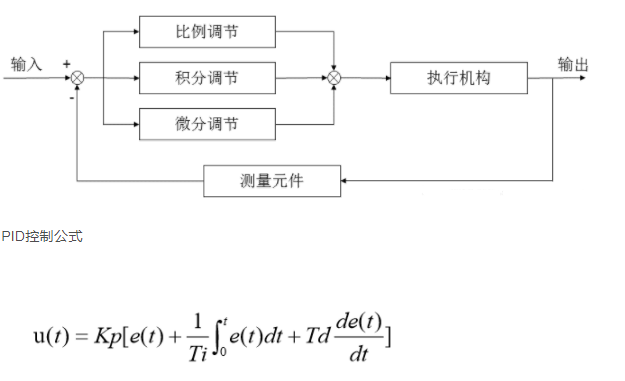
1PID控制算法 什么是PID PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法
2021-03-22 15:32

算法的原理,然后带大家使用FPGA来实现(C语言实现过程特别简单)。 二. PID算法 PID取自比例、积分、微分三个英文字母的首字母。意味着算法由这三部分组成。 1. P 比例 运算过程为 期望值 减去 当前值 ,然后再乘上一个p
2023-07-20 09:23
PID(比例-积分-微分)控制器作为工业自动化领域中的核心控制算法,广泛应用于各种需要精确控制的系统中。在PID控制器的实现中,有两种主要的控制模式:位置式PID和增量式PID
2024-06-05 16:23
增量式PID控制,数字PID控制算法的一种基本形式,是通过对控制量的增量(本次控制量和上次控制量的差值)进行PID控制的一种控制算法。
2018-02-26 14:57

在无线通信系统中,“噪声系数(NF)”或相关的“噪声系数(F)”是用于指定无线电接收器性能的数字。噪声系数值越低,性能越好。本教程更详细地讨论了这个重要参数,并描述了三
2023-03-03 15:20

PID=port ID,在STP(生成树协议)中,若在端口收到的BPDU中BID和path cost相同时,则比较PID来选择阻塞端口。数字电视复用系统名词 PID(P
2017-12-20 19:17

噪声系数的定义是输入信噪比比上输出信噪比,即噪声系数是对信号的SNR下降的程度进行衡量。
2024-03-27 15:14