10种简单的数字滤波算法(C语言源程序) 假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程
2009-07-16 15:17
由上式可以看出,本次滤波的输出值主要取决于上次滤波的输出值(注意不是上次的采样值,这和加权平均滤波是有本质区别的),本次采样值对滤波输出的贡献是比较小的,但多少有些修正
2020-07-08 11:13

嵌入式测控系统中数字滤波算法的实现 0 引言 模拟信号都必须经过A/D转换才能被嵌入式控制器接收。但在干扰作用于模拟信号之
2010-03-05 11:31
单片机主要作用是控制外围的器件,并实现一定的通信和数据处理。但在某些特定场合,不可避免地要用到数学运算,尽管单片机并不擅长实现算法和进行复杂的运算。
2019-01-07 14:19
单片机主要作用是控制外围的器件,并实现一定的通信和数据处理。但在某些特定场合,不可避免地要用到数学运算,尽管单片机并不擅长实现算法和进行复杂的运算。下面主要是介绍如何用单片机实现数字滤波。
2018-02-28 09:41
单片机主要作用是控制外围的器件,并实现一定的通信和数据处理。但在某些特定场合,不可避免地要用到数学运算,尽管单片机并不擅长实现算法和进行复杂的运算。下面主要是介绍如何用单片机实现数字滤波。
2017-04-27 08:42
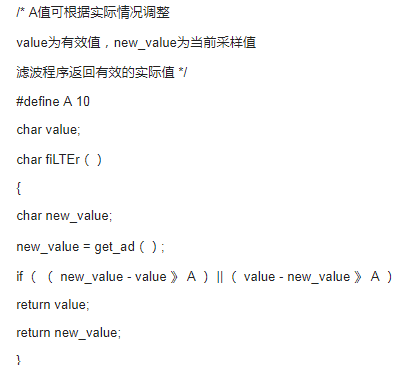
假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();/* N值可根据实际情况调整,排序采用冒泡法*/。
2018-03-07 14:43
限幅消抖滤波法是一种简单有效的数字滤波算法,常用于对采集到的离散信号进行去抖动处理。它可以去除信号中的瞬时噪声和突发干扰,同时保留信号的主要特征。
2023-11-21 14:47
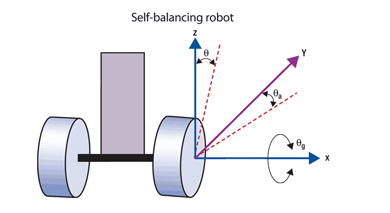
传感器融合的目的是将每个传感器的测量数据作为输入,然后应用数字滤波算法来相互补偿,并输出准确且响应迅速的动态姿态(俯仰/侧倾/偏航)结果。
2021-05-06 08:28
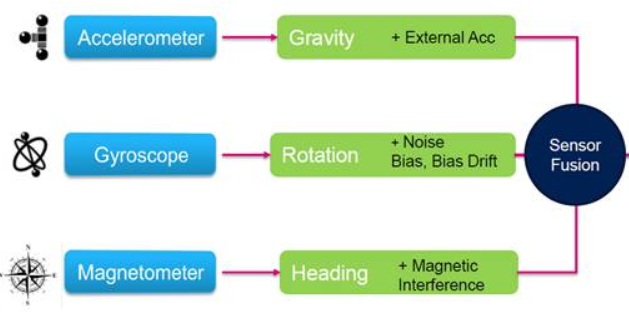
简单来说,姿态融合算法就是融合多种运动传感器数据(一般需要3轴加速度, 3轴陀螺仪或者3轴地磁感应传感器),通过数字滤波算法容错补偿,实现当前姿态检测。
2017-09-05 09:47