计算机视觉的特征提取算法研究至关重要。在一些算法中,一个高复杂度特征的提取可能能够解决问题(进行目标检测等目的),但这将以处理更多数据,需要更高的处理效果为代价。而颜色特征
2017-11-16 14:12
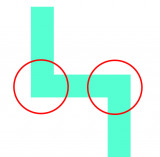
鲁棒、精确的定位是移动自主系统的基本要求。交通标志、电线杆、路灯等类似杆子的物体,由于其独特的局部性和长期的稳定性,在城市环境中经常被用作定位的地标。本文提出了一种新颖、准确、快速的基于几何特征
2022-10-09 14:48
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和 D. Harwood 在1994年提出,用于纹理特征提取
2018-01-30 10:49

方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来
2018-01-22 16:30

基于静态时序分析(STA)的现代设计流程非常依赖标准单元、IO、存储器和定制模块的特征化Liberty模型。高效、准确的库特征提取是全芯片或模块级设计流程的关键步骤之一,因为它能确保所有库单元在所
2024-12-26 11:15
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。 在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指图像特征(Features)。
2024-04-19 11:41
后面计算的是特征点主方向上的描述子,计算过程中要将特征点周围像素旋转到主方向上,因此计算一个半径为16的圆的近似坐标,用于后面计算描述子时进行旋转操作.
2022-10-14 09:50

在一对图像中寻找匹配的像素是具有各种应用的基本计算机视觉任务。由于光流估计和局部特征匹配等不同任务的特定要求,以前的工作主要分为稠密匹配和稀疏特征匹配,侧重于特定的体系结构和特定任务的数据集,这可能在一定程度上阻碍了特定模型的泛化性能。
2023-11-27 11:32
区域和轮廓只包含对分割结果的原始描述,在实际应用中我们还需要从区域或轮廓中确定一个或多个特征量。这些确定的特征量被称为特征。
2023-10-23 14:12
相机只有旋转而无平移的时候,两视图的对极约束不成立,基础矩阵F为零矩阵,这时候需要使用单应矩阵H场景中的点都在同一个平面上,可以使用单应矩阵计算像点的匹配点。
2023-12-10 10:52