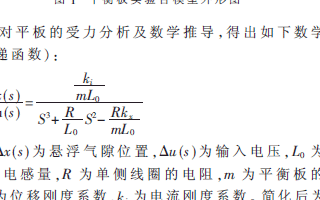
目前,以磁悬浮系统为主的制造业发展较为缓慢,其关键是产品的设计方法有待提高。而作为磁悬浮基础的单自由度控制策略与方法则可以视为多自由度系统控制的基础,因而具有很高的研究
2019-04-16 16:07
DoS是Denial of Service的简写就是拒绝服务,而DDoS就是Distributed Denial of Service的简写就是分布式拒绝服务,而DRDoS就是Distributed Reflection Denial of Service的简写,这是分布反射式拒绝服务的意思。
2017-12-28 11:44

以前我们讲过关于自由口通讯的实例,今天我们讲一下自由口通讯配合中断的实例。
2023-05-15 10:10
现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23
本文通过对自由立体显示系统中人的因素分析以及自由立体显示图像制作分析,为了使人得到很好的三维立体感觉,进行了综合的人机交互分析。
2018-03-22 09:05

现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个
2018-02-07 15:40

本文以施耐德的SoMachine为例介绍以ICE61163-3为编程标准的PLC编程软件自由通讯口设置。这是以PLC作为数据采集对象常用的通讯方式。
2023-05-29 14:25

西门子S7-200CPU的通信口可以设置为自由口模式。选择自由口模式后,用户程序就可以完全控制通信端口的操作,通信协议也完全受用户程序控制。
2018-11-19 14:20

编写程序前应找到关键通信地址,控制启停正反转的控制字地址为40100,频率地址为40101。应转换成十六进制地址,转换方法将40100-40001=99,再将99转换成16#0063,同理40101转换成16#0064。
2019-01-24 14:02
六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的关键所在。在一些早期的产品中对感应天线接收信号的处理主要采用模拟电路和单
2011-01-25 00:11