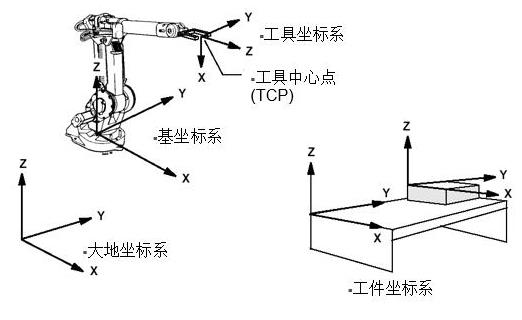
坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标系统。
2017-02-19 12:03
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
2019-05-14 09:56

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标
2023-07-03 10:30

本文是基于Linux嵌入式操作系统在UP-TECHS3C2410DVK1。1开发平台下设计并实现了一个高性能、低功耗、低成本的嵌入式掌上娱乐系统。
2018-03-27 10:47
随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错
2018-11-11 09:37
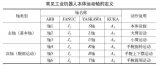
在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
2018-10-05 17:43
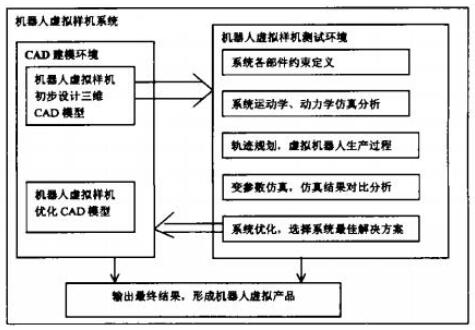
进行机器人虚拟样机的研究开发,将虚拟样机技术应用于机器人仿真研究领域。一方面拓展虚拟样机技术的研究与应用范围,同时在虚拟
2016-12-28 11:32
仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
上个世纪"原子的太阳系模型"在科学上的突破,并不能代表互联网的“大脑模型”因此就正确,这个科学史历程只是说明,当一个系统因为特别的原因无法获知其整体结构时,用另外一个已知的,大众更容易理解的系统模型进行对比和解释,应该是科学研究的一种方法。
2018-06-14 10:45

世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右
2018-05-04 09:00