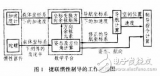
1 引言 捷联惯性制导是随着计算机技术的发展而发展起来的惯性制导技术,由于它是用一个数学平台来代替平台式惯性制导系统中的陀螺稳定平台,因而具有成本低、结构简单、体积小、可靠性高等优点。但正是由于没有
2017-10-23 15:43
MEMS陀螺捷联惯导系统标定方法综述
2021-08-05 16:54
基于MEMS的捷联姿态系统的设计与试验_胡佳兴
2017-01-12 20:03
《捷联导引头稳定与跟踪技术》pdf
2022-01-11 09:29
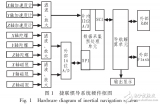
提出了一种捷联式惯性测量单元的设计与实现方法。该系统以开环光纤陀螺和硅微加速度计作为惯性敏感元件,采用高速DSP 作为中央处理器实现数据采集、处理及输出。重点介绍了系统
2011-09-13 15:01
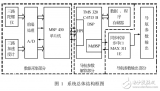
采用商用MEMS传感器设计一种小型捷联惯导系统。该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解算单元,同时在初始对准和陀螺
2017-11-29 11:21
高精度游移方位捷联惯导系统的数字仿真::捷联惯导系统的数字仿真对于系统设计、方案论证和算法研究有着重要的意义,特别是游移方位捷
2009-06-21 22:37
本论文分上下两篇,用于给现代捷联惯导系统的主要软件算法设计提供一个严密的综合方法:将角速率积分成姿态角,将加速度变换或积分成速度以及将速度积分成位置。该算法是用两速修正法构成的,而两速修正法是具有
2016-12-12 21:50
捷联图像导引系统传感器数字复合式稳像方法_方丹
2017-01-03 15:24
基于DSP_MCU的小型捷联惯性导航计算机系统
2017-10-20 08:21