MEMS陀螺捷联惯导系统标定方法综述
2021-08-05 16:54
采用商用MEMS传感器设计一种小型捷联惯导系统。该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解
2017-11-29 11:21
高精度游移方位捷联惯导系统的数字仿真::捷联
2009-06-21 22:37
捷联惯导系统中微机械陀螺测试参数的分析与标定
2016-12-17 16:33
为了有效防止捷联惯导系统滤波发散,本文从卡尔曼滤波原理出发,介绍了渐消卡尔曼滤波原理、遗忘因子等内容,通过对渐消因子的推导及计算机仿真,给出了常规卡尔曼滤波器
2009-05-30 08:49
当捷联惯组(SIMU)安装到载车上存在安装误差时,航位推算误差与安装误差、里程计刻度系数误差、初始对准误差有关。利用捷联
2013-08-19 17:51
MEMS 陀螺惯组的数学模型,标定和补偿是提高 MEMS 惯组性能 是一篇值得学习的文章。
2022-07-04 14:50
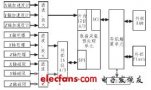
该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解算单元,同时在初始对准和陀螺降噪中引入无迹卡尔曼滤波和小波自适应阀值
2012-01-12 10:33

近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。相应地,惯性技术的研究和开发也获得前所未有的蓬勃发展,越来越多的高校学生、爱好者和工程技术人员加入到惯性技术的研发队伍中来。
2020-08-20 08:00

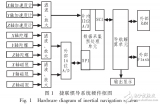
满足导航系统设计的小型化、实时性要求,本文提出了一种基于FPGA+DSP的实现方案。该方案的设计思路是:将FPGA映射到DSP EMIF的一段地址空间,并用FPGA来完成多通道信号的采集;DSP根据接收到的数据完成导航解算并以总线(如CAN)形式输出给控制设备和外部测试设备。本文重点介绍了惯性测量单元、数据采集与接口电路和导航计算机等方面的硬件和软件设计;最后对已完成的试验样机进行全面性能测试,结果表明此设计可以达到预期的设计要求。
2018-11-07 17:18