9月13日,2020i-VISTA自动驾驶汽车挑战赛见证仪式在重庆两江新区礼嘉智慧公园举行。
2020-09-15 09:33

在由玻色量子协办的第二届APMCM“五岳杯”量子计算挑战赛上,来自北京理工大学(BIT)的两支参赛队伍荣获银奖,其中一支队伍就是QuBIT团队。该团队由北京理工大学管理学院张玉利教授指导,依托玻色
2025-04-28 13:55
小车抓取物体时,通过红外传感器实现避障到达目的地,然后进行物体抓取并放到指定位置,此动作可自动完成,也可通过蓝牙通讯控制完成,使之更加灵活。
2023-03-03 11:29
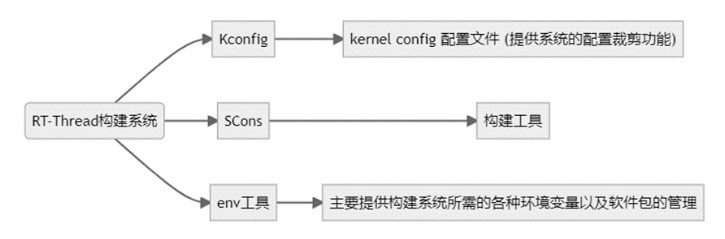
在开始前,需要熟悉RT-Thread的构建系统,在官方的文档界面可以看到关于构建系统的各个组成部分的介绍。
2023-10-09 15:56

and question answering》(ACL 2018)在单文档阅读理解(斯坦福 SQuAD 挑战赛)取得的成果后,阿里巴巴研究团队在机器阅读理解领域的又一次突破。
2019-07-13 08:26

各位 AI 爱好者们,准备好通过各种 AI 技术来应对一个迫切需要被解决的全球问题了吗?MathWorks 诚邀您参加 2025 IEEE Signal Processing Cup 挑战赛:“野外深度伪造人脸检测”(DFWild-Cup)。
2024-10-17 10:46
13款车型的测评结果基本能够反映目前量产ADAS功能的技术水平。13款测评车型均搭载了AEB功能,而且除了一款车型,其他12款都是优秀(++++)等级。这和日前举行的i-VISTA自动驾驶挑战赛
2018-09-25 16:01

目标检测中有很大一部分工作是做图像分类。对于图像分类,不得不提的是2012年ImageNet大规模视觉识别挑战赛(ILSVRC)上,机器学习泰斗 Geoffrey Hinton 教授带领学生
2023-09-08 17:08
然而,尽管目前性能最好的对象检测器依赖于滑动窗口预测来生成初始候选区域,但获得更准确的预测主要来自对这些候选区域进行细化的阶段,如 Faster R-CNN 和 Mask R-CNN,分别用于边界框目标检测和实例分割。这类方法已经主导了 COCO 目标检测挑战赛。
2019-04-08 12:00
在武术擂台技术挑战赛中,机器人要采集目标的位置信息。由于I/O、A/D转换的有效检测距离有限,机器人采用摄像头采集场地上的图像信息,根据目标的颜色进行识别、定位。当检测到目标位置以后控制舵机自主运动向目标靠拢,完成自我介绍、抱绣球等动作。所设计的机器人外形如图1所示。
2021-04-13 15:22