
针对 倒立摆 的起摆控制建立了环形单级倒立摆基于拉格朗日方程的运动方程,在此基础上提出了能量控制的概念,并将能量补偿控制
2011-07-06 18:03
本文通过拉格朗日方程推导出环形一级倒立摆系统的数学模型,用能量方法对该模型进行摆起控制;在倒立摆成功摆起后,在倒立平衡点对系统模型进行线性化,并用线性二次
2009-05-25 15:36
本文通过拉格朗日方程推导出环形一级倒立摆系统的数学模型,用能量方法对该模型进行摆起控制;在倒立摆成功摆起后,在倒立平衡点对系统模型进行线性化,并用线性二次型
2009-05-25 15:07

倒立摆 系统是一个复杂的!非线性的!不稳定的高阶系统 倒立摆的控制一直是控制理论及应用的典型课题分析了如何利用拉格朗日方程对直线柔性连接两级倒立摆系统建模采用法设计最优
2011-07-06 18:17
针对在小口径自动炮上使用的支架, 将火炮身管和支架简化为空间多段有限元弹性梁单元, 引入形函数矩阵描述梁单元的挠度, 采用拉格朗日方程建立了考虑支架与身管耦合的有限
2009-03-25 17:01
本文以典型多变量非线性系统——球棒系统为研究对象,用拉格朗日方程建立其数学模型,并用现代控制理论中的状态反馈的方法设计该非线性系统的控制器。无论小球在棒的什么
2009-08-29 10:24
0、前言试着推导并实现四自由机械臂的运动方程,在此处使用拉格朗日法进行。系统机构图如下:注:第一个关节是圆柱转盘,其他关节绕枢轴点转动。其中Tm为关节驱动力矩,由电机提
2021-09-15 06:50
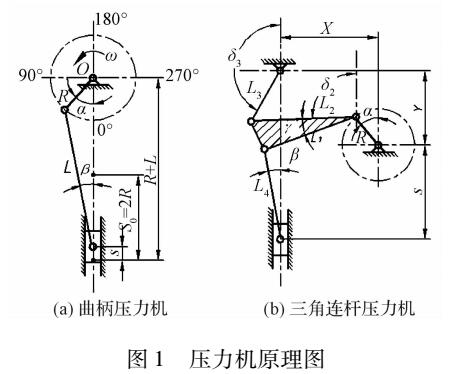
ADAMS软件建立了三角连杆机构压力机模型,采用多刚体系统动力学理论巾的拉格朗日方程方法,对其进行了运动学和动力学仿真。研究结果表明,与曲柄滑块机构相比,所设计的三角连
2018-03-15 14:08

针对制孔机器人在制孔过程巾的振动抑制问题,对典型的双关节制孑L机器进行了研究,仅考虑进给方向钻削力对制孔机器人系统的影响,分析了制孔过程中振动产生的机理,提出了模糊补偿抑振的控制算法。根据拉格朗
2018-03-05 11:44
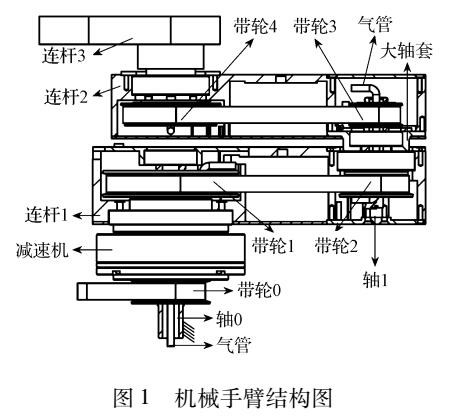
。利用多坐标系分析方法和角速度叠加原理求出了任意臂长、任意同步带传动比下的末端连杆位姿方程,求出了末端连杆做直线运动的臂长、传动比条件并进行了实验验证。利用拉格朗
2018-03-20 14:52