基于扩张状态观测器的永磁无刷直流电机滑模变结构控制_夏长亮
2016-12-15 18:02
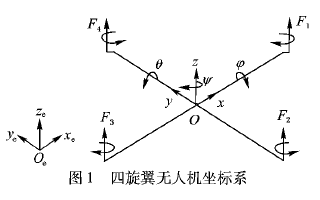
为了解决欠驱动四旋翼无人机( UAV)在实际飞行中存在的外界干扰问题,同时提高在系统参数摄动情况下的精确轨迹跟踪效果,设计了一种基于扩张状态观测器( ESO)和积分型反步滑模算法的飞行控制策略。
2018-12-28 16:41
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档永磁同步电机的无感控制(一)——— 传统的滑模观测器前言1、传统滑模观测器的设计2、传统滑模观测器的仿真2.1传统滑模
2021-08-27 08:07
负载转矩观测器的设计与仿真实现假定负载转矩在永磁同步电机控制系统中被认作外部负载扰动,负载是不可测的,但是可观的。从而,依据PMSM数学模型(1)中进行负载转矩观测器的设计,具体如下:1.1负载转矩
2021-09-15 07:56
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。
2021-08-27 06:52
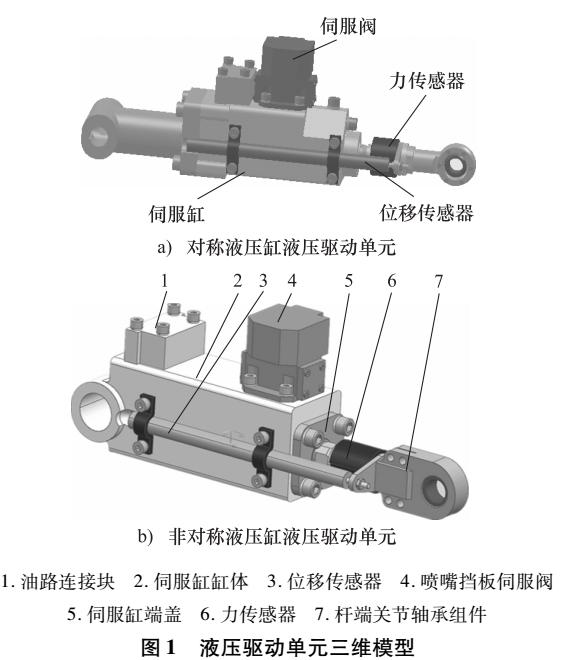
状态空间表达式;将系统的总扰动扩张为一个新的状态变量,从而建立了液压驱动单元位置控制系统的扩张状态
2018-02-26 13:47
龙贝格负载转速观测器pmsm永磁电机 可提供文档
2021-08-31 09:04
的问题,该文提出一种基于滑模观测器的电流偏差解耦控制方法。通过计算偏差解耦控制电流的耦合项,发现相对于传统电压前馈解耦,偏差解耦的耦合项简单且易于控制,解决了传统电压前馈解耦控制解耦效果不理想的问题。通过电流滑模观测器的跟踪特性,将定子电流的估计值作为
2021-08-27 06:41
上一篇文章,写到了滑模观测器的设计过程,此过程过后可以得到滑模输出的扩展反电动势。按照反正切函数的原理,只需要对扩展反电动势进行求解反正切即可。如下所示:但是事实上,直接通过滑模观测器输出的扩展
2021-07-13 08:40
为了克服PID控制器自身具有的缺陷,在PID的基础上提出了自抗扰控制器(ADRc)。该控制器由跟踪微分器、扩张
2009-03-14 08:37