电子发烧友
2747次浏览
品质的因素,包括电流环的动态耦合,速度环的未知扰动等。然后,在介绍扩张状态观测器的原理及功能的基础上,设计了三个扩张状态
2025-06-09 16:11
基于扩张状态观测器的永磁无刷直流电机滑模变结构控制_夏长亮
2016-12-15 18:02
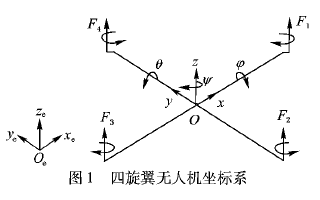
为了解决欠驱动四旋翼无人机( UAV)在实际飞行中存在的外界干扰问题,同时提高在系统参数摄动情况下的精确轨迹跟踪效果,设计了一种基于扩张状态观测器( ESO)和积分型反步滑模算法的飞行控制策略。
2018-12-28 16:41
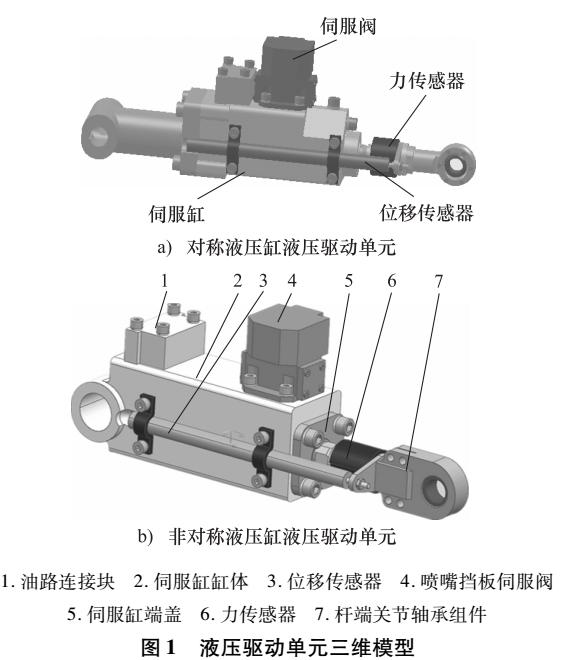
状态空间表达式;将系统的总扰动扩张为一个新的状态变量,从而建立了液压驱动单元位置控制系统的扩张状态
2018-02-26 13:47
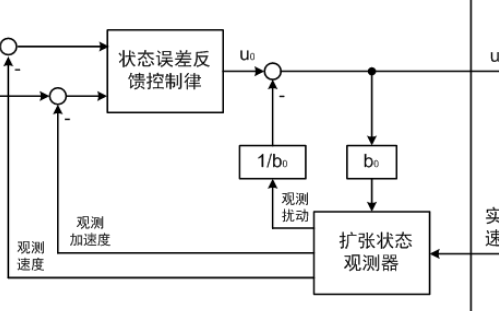
前言 上篇中详细阐述了经典的自抗扰控制算法的原理,本篇将围绕两种ADRC算法展开,针对扩张状态观测器的参数整定问题进行详解,同时,对跟踪微分器的几个重要应用进行介绍。
2021-09-07 08:02
观测器ADRC的公式以及参数整定一、跟踪微分器(TD)二、非线性反馈函数三、扩张状态观测器(ESO)ADRC应用到...
2021-08-18 08:08
ADRC的“扩张状态观测器”输出的观测扰动,包含系统外部的干扰,如强风吹动螺旋桨,影响无人机的电机速度,也包含内部的干扰,例如电机发热,预先估计的特性不准了。
2018-05-16 09:11
为了克服PID控制器自身具有的缺陷,在PID的基础上提出了自抗扰控制器(ADRc)。该控制器由跟踪微分器、扩张
2009-03-14 08:37
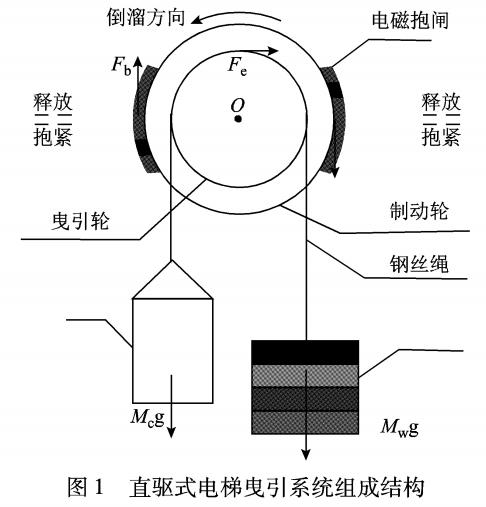
针对无称重传感器的直驱式永磁曳引系统起动时易发生倒溜问题,提出一种采用自抗扰的转矩控制策略,用以乘梯舒适性。利用扩张状态观测器与非线性误差反馈理论,设计自抗扰控制
2018-03-05 10:48
观测器来估计和补偿系统的全部干扰,同时给出了线性状态误差反馈控制器来保证系统的闭环响应性能。证明了线性扩张状态
2018-03-15 14:00