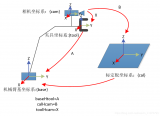
机械手搭载双目相机,手眼标定。
2023-07-11 11:18
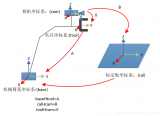
这种情况的标定过程实际上和相机和机械手分离的标定方法是一样的,因为相机拍照时,机械手会运动到相机标定的时候的位置,然后相机拍照,得到目标的坐标,再控制机械手,所以简单的相机固定在末端的
2020-07-11 09:57
机械手搭载双目相机,手眼标定。
2023-04-20 16:32

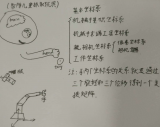
首先,我们要了解一下常规的手眼标定流程是怎么样的。
2023-07-25 16:52

在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,
2020-08-28 11:42
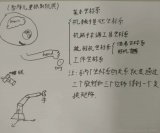
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,
2023-07-03 15:45
相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。
2024-03-18 09:44

张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。
2023-08-03 10:59

踩坑 手眼标定的算法网上是比较多的,但是很多都不好用。github上高赞的easy_handeye,试了一下,但是mycobot600没有提供moveit的配置,而我ROS基础不是很好,不太会修改
2022-06-24 15:49
